Package com.openinventor.imageviz.engines.edgedetection.gradient
In the continuous 2-D case, the gradient of an image  is defined along two orthogonal directions as:
is defined along two orthogonal directions as: 

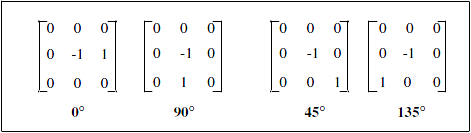
This operator is approximated in the discrete case by differences, as initially introduced by Roberts:


along first and second diagonal directions.
These operators are implemented by convolutions with the kernels specified in Figure 1. They enhance edges in the {0,90} or {45,135} directions, respectively.
 In addition, one can define the
magnitude
In addition, one can define the
magnitude and
orientation
and
orientation of the gradient, as:
of the gradient, as:


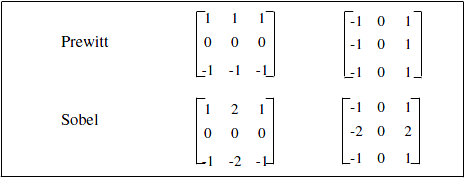
Note that when applying such filters to an image, the output images consist of positive and negative intensities, with an unusual appearance. The derivative operator behaves as a high frequency filter, i.e. it emphasizes details of an image. An immediate drawback of these gradient filters is their sensitivity to noise. When applied to grainy or textured images, the output image consists of high intensities which correspond to both true edges (luminance transitions), and noise (texture, grain aspect, etc.). This sensitivity to noise can be reduced by using larger kernels to approximate the derivative operators.
Typical masks, such as Prewitt or Sobel detectors for 3x3 kernels are given in Figure 2.
 Another approach is to use morphological operators to estimate the gradient magnitude. We can then define morphological gradients as:
Another approach is to use morphological operators to estimate the gradient magnitude. We can then define morphological gradients as:
 which marks the outer contours,
which marks the outer contours,
 which marks the inner contours,
which marks the inner contours,
 which marks contours of two-pixel widths for a 3x3 kernel B.
which marks contours of two-pixel widths for a 3x3 kernel B.
 is the result of a dilation with the neighborhood B, and
is the result of a dilation with the neighborhood B, and  the result of an erosion.
the result of an erosion.
In  , it can be shown that
, it can be shown that  tends towards the gradient magnitude when B is a disk whose radius r tends towards 0.
tends towards the gradient magnitude when B is a disk whose radius r tends towards 0.
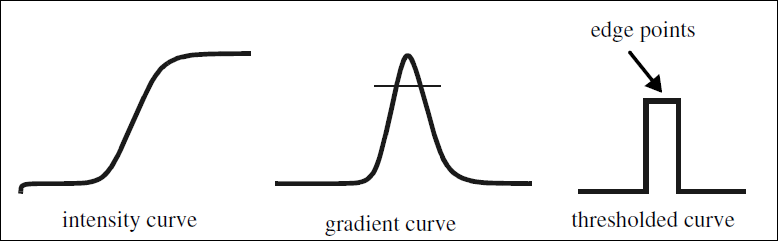
The output of the above gradients are gray level images, corresponding to emphasized edges in two orthogonal directions. The next step is to identify the pixels on these images which actually correspond to edge points. A common approach is to mark points of sufficiently large gradient magnitude, i.e. points where the luminance transition is sharp enough. This threshold of the gradient magnitude is illustrated in Figure 3.
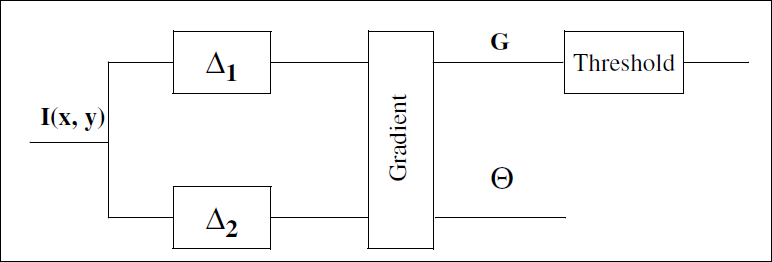
 The overall detection scheme is outlined in Figure 4.
The overall detection scheme is outlined in Figure 4.
 Remark: The normalization parameter enables to divide the value of the gradient by the sum of the absolute values of the masks, which reduces the noise sensitivity, avoids overflow, but lowers the contrast. Only main edges will appear on the gradient image. If no normalization is performed, be careful with possible overflow, but edges will be much more evident.
Remark: The normalization parameter enables to divide the value of the gradient by the sum of the absolute values of the masks, which reduces the noise sensitivity, avoids overflow, but lowers the contrast. Only main edges will appear on the gradient image. If no normalization is performed, be careful with possible overflow, but edges will be much more evident.
-
Class Summary Class Description SoGradientMagnitudeProcessing2d SoGradientMagnitudeProcessing2dengine.SoGradientMagnitudeProcessing3d SoGradientMagnitudeProcessing3dengine.SoGradientOperatorProcessing2d SoGradientOperatorProcessing2dengine provides different algorithms to extract the edges of a 2D image.SoGradientOperatorProcessing3d SoGradientOperatorProcessing3dengine provides different operators to extract the edges from a 3D image.SoMorphologicalGradientProcessing SoRadialGradientCenteredProcessing2d SoRadialGradientCenteredProcessing3d SoRadialGradientContourProcessing2d SoRadialGradientContourProcessing3d SoRadialGradientLabelProcessing2d SoRadialGradientLabelProcessing3d