|
Open Inventor Release 2023.2.3
|
|

| |
|
Open Inventor Release 2023.2.3
|
|
|
| |
Classes | |
| class | SoDataMeasure |
 Abstract base class for all ImageViz image data measures. More... Abstract base class for all ImageViz image data measures. More... | |
| class | SoDataMeasureAttributes |
| Class for all ImageViz data measure attributes. More... | |
| class | SoDataMeasureCustom |
| class to define a custom measure. More... | |
| class | SoDataMeasurePredefined |
| class that define the list of predefined measure that can be used on image data input. More... | |
For instance, a set of measurements has to be selected using SoLabelAnalysisQuantification, SoLabelFilteringAnalysisQuantification or SoGlobalAnalysisQuantification engines. Here are described general priciples that help to understand most of the ImageViz predefined measurements.
The SoDataMeasurePredefined class contains the list of the measurements that are immediately available in ImageViz. Each measurement is identified by a PredefinedMeasure enumerate. The name of these enumerates may end with 2D or 3D:
Enumerates having a name starting with GRAY or INTENSITY are measurements based on the intensity image input.
These measures don't support intensity images with more than one channel. Please use the SoColorGetPlaneProcessing2d engine to extract the required channel before computing the intensity measurement.
Please see section Image Analysis to know how to perform analysis on such measurements.
In the continuous case they are defined as:
![\[ M_{1x}=\frac{1}{A(X)}\int_X x \times g(x,y,z) \, dx \, dy \, dz \]](form_609_dark.png)
![\[ M_{1y}=\frac{1}{A(X)}\int_X y \times g(x,y,z) \, dx \, dy \, dz \]](form_610_dark.png)
![\[ M_{1z}=\frac{1}{A(X)}\int_X z \times g(x,y,z) \, dx \, dy \, dz \]](form_611_dark.png)
and in the discrete case as:
![\[ M_{1x} = \frac{1}{A(X)}\sum_{X}{x_i \times g(x_i,y_j,z_k)} \]](form_612_dark.png)
![\[ M_{1y} = \frac{1}{A(X)}\sum_{X}{y_j \times g(x_i,y_j,z_k)} \]](form_613_dark.png)
![\[ M_{1z} = \frac{1}{A(X)}\sum_{X}{z_k \times g(x_i,y_j,z_k)} \]](form_614_dark.png)
Where 

For gray level images 

Note :
![\[M= \left[ \begin{array}{ccc}
M_{2x} & M_{2xy} & M_{2xz}\\
M_{2xy} & M_{2y} & M_{2yz}\\
M_{2xz} & M_{2yz} & M_{2z}\end{array}\right]\]](form_625_dark.png)
The orientation is defined as the direction of its major inertia axis. It is given as the eigenvector of the largest eigenvalue of the covariance matrix.
This is a good measure of the orientation for simple, roughly convex objects.
The result 
The result 
The secondary orientation (or orientation2) is defined as the direction of its minor inertia axis. It is given as the eigenvector of the smallest eigenvalue of the covariance matrix.
The Euler number, or connectivity factor 



For objects with no hole, a very fast algorithm exists to compute the number of objects or components.
The Euler number is a topological parameter, which describes the structure of an object, regardless of its specific geometric shape. Other topological parameters exist, such as the number of branches or of triple points in a skeleton, the hierarchical degree of a tree-like skeleton or the number of neighbours for a cell in a skeleton by zone of influence.
The connectivity number 

The Euler number is obtained as the sum of measures in local neighborhoods. In the continuous case, this measure is null almost everywhere, except on contours. An example illustrates this for polygonal shapes in the figure 1.
In the discrete case, the local measure, a search for specific configurations, is derived from the Euler formula for graph: 





On a square grid, one gets:
![\[N_2(X)=N \left[\begin{array}{cc}
1 & 0\\
0 & 0\end{array}\right]-N\left[\begin{array}{cc}
. & 0\\
1 & 0\end{array}\right]\]](form_636_dark.png)
For example, consider the Euler number in the following continuous case of a polygonal object with no loops, and bounding an object or a hole.
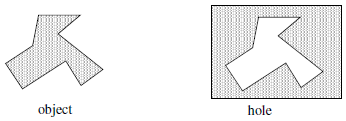
A simple local measure can identify this contour as the boundary of an object or a hole. We define a measure 


Two situations may occur: the object points (shaded set) lie in the concavity or in the convexity.
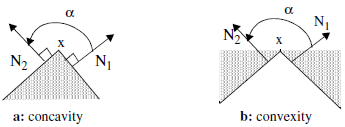
In the first case the measure 





The polygonal measure is then defined as:
![\[m(P) = \sum_{s_i}m(s_i)~\mbox{, where $s_i$ are the polygonal vertices.}\]](form_644_dark.png)
One can easily show that:



If several disjointed polygonal contours exist in an image, one can apply this measure on each contour, and obtain:
![\[m(\cup P_i)=2\pi\times N_C - 2\pi\times N_t \mbox{,}\]](form_647_dark.png)
which gives the Euler formula.
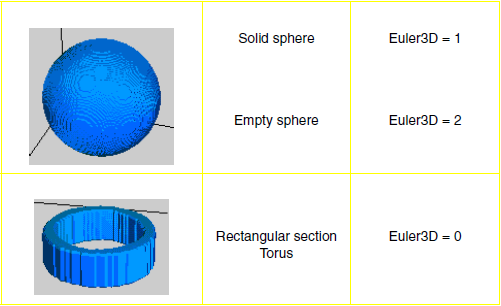
In 3D, the Euler-Poincaré number of the object is an indicator of the connectivity of a complex structure. The components of the Euler number are the three Betti numbers:




![\[\chi(X)=\beta_0-\beta_1+\beta_2\]](form_651_dark.png)
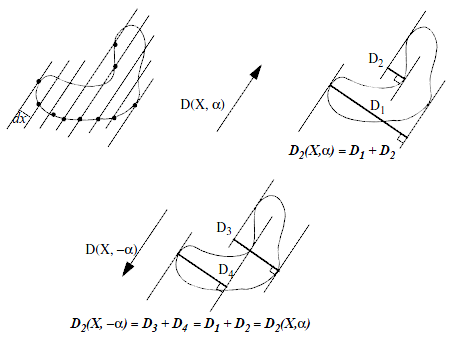
Feret's diameter is defined as the distance between two parallel tangents of a particle on a given direction like the measurement by a caliper (see Figure 4). This definition is extended to 3D with the distance between two tangent planes.
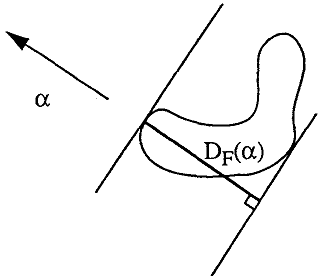

By default the distribution of Feret diameter is made up of a sampling of 10 angles from 0 to 162 degree with a step of 18 degree. This distribution can be customized with the Feret 2D angles attributes.
In 3D Feret diameter is a one-dimensional measurement that estimates how "wide" some segmented object is, when projected by a particular angle. The distance between the outermost tangents of the segmented object defines the diameter for that angle:
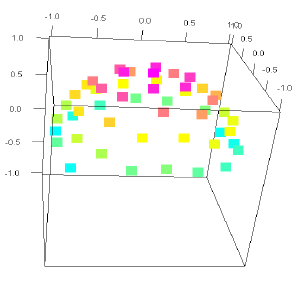
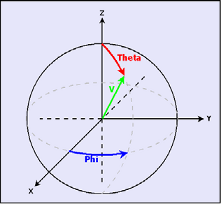
The 3D distribution is computed to get the predefined number of angles regularly spreaded around the upper part of the unit sphere. By default a sampling of 31 angles. This distribution can be customized with the Feret 3D angles attributes. The orientations are defined by the couple of angles from spherical coordinates 
The direction given by the Feret diameters allows to defines four angles:


![\[D_2(X,\alpha)=\int{N_\alpha(X)dx}\]](form_656_dark.png)
Where 

Note that 
The discrete case in 2D translates to the search for specific configurations, as defined in the table below.
![\[ \begin{array}{|c|c|}
\hline
0 & \begin{array}{ccccc}
\mbox{x} & & \mbox{x} & & \mbox{x}\\
\mbox{x} & & 0 & & 1\\
\mbox{x} & & \mbox{x} & & \mbox{x}
\end{array}\\
\hline
45 & \begin{array}{ccccc}
\mbox{x} & & \mbox{x} & & 1\\
\mbox{x} & & 0 & & \mbox{x}\\
\mbox{x} & & \mbox{x} & & \mbox{x}
\end{array}\\
\hline
90 & \begin{array}{ccccc}
\mbox{x} & & 1 & & \mbox{x}\\
\mbox{x} & & 0 & & \mbox{x}\\
\mbox{x} & & \mbox{x} & & \mbox{x}
\end{array}\\
\hline
135 & \begin{array}{ccccc}
1 & & \mbox{x} & & \mbox{x}\\
\mbox{x} & & 0 & & \mbox{x}\\
\mbox{x} & & \mbox{x} & & \mbox{x}
\end{array}\\
\hline
\end{array} \]](form_660_dark.png)
![\[L(X)=\int_{0}^{\pi}D_2(X,\alpha)d\alpha\]](form_661_dark.png)
The perimeter is then approximated when the above integral is replaced by a discrete summation. In the square grid case, the summation is computed for the four fundamental directions:
![\[L(X)=\frac{\pi}{4}\times [a \times(N_0+N_{90})+\frac{a}{\sqrt2}\times(N_{45}+N_{135}) \right ] \]](form_662_dark.png)
Where:






Finally, this formula can be corrected for non square pixels. In such a situation, the diagonals no longer fit the 
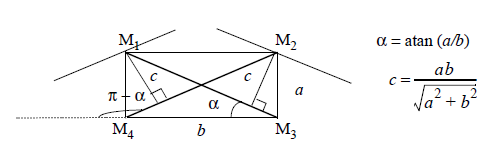
The formula becomes:
![\[L(X)=\alpha \times a \times N_0 + (\frac{\pi}{2}-\alpha)\times b \times N_{90}
+ \frac{\pi}{4}\times c \times (N_{\alpha}+N_{\pi-\alpha}) \]](form_666_dark.png)
Such a quantile value is computed by interpolation between the first bin where the cumulated histogram is higher than the percentage of observations and its previous bin.
The cumulated histogram is given at the center of each bin, counting the half population of the current bin. For instance with a bin size of 1, the cumulated histogram for the bin 3.. 4 is computed adding the total population of the values 0, 1 and 2 to the half population of the value 3. It is assigned to the bin center 3.5.
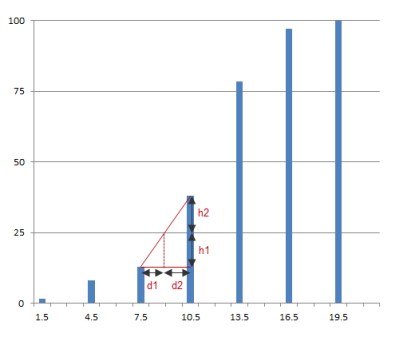
With the example above, where the bin size is 3, the 25% quantile value of the histogram is:
![\[ Q(25) = \lambda \times 7.5 + (1- \lambda) \times 10.5 \]](form_667_dark.png)
Where :
![\[ \lambda = \frac{d2}{(d1+d2)} = \frac{h2}{(h1+h2)} \]](form_668_dark.png)
![\[M_{2x} = \frac{1}{A(X)}\sum_{X}{(x_i-M_{1x})^2 \times g(x_i,y_j,z_k)}\]](form_619_dark.png)
![\[M_{2y} = \frac{1}{A(X)}\sum_{X}{(y_i-M_{1y})^2 \times g(x_i,y_j,z_k)}\]](form_620_dark.png)
![\[M_{2z} = \frac{1}{A(X)}\sum_{X}{(z_i-M_{1z})^2 \times g(x_i,y_j,z_k)}\]](form_621_dark.png)
![\[M_{2xy} = \frac{1}{A(X)}\sum_{X}{(x_i-M_{1x})(y_i-M_{1y}) \times g(x_i,y_j,z_k)}\]](form_622_dark.png)
![\[M_{2xz} = \frac{1}{A(X)}\sum_{X}{(x_i-M_{1x})(z_i-M_{1z}) \times g(x_i,y_j,z_k)}\]](form_623_dark.png)
![\[M_{2yz} = \frac{1}{A(X)}\sum_{X}{(y_i-M_{1y})(z_i-M_{1z}) \times g(x_i,y_j,z_k)}\]](form_624_dark.png)