SoCentroidPathTortuosityQuantification3d Class Reference
[Global Measures]
 SoCentroidPathTortuosityQuantification3d engine the tortuosity of a path formed by centroids of each plan of a binary 3D image along z-axis.
More...
SoCentroidPathTortuosityQuantification3d engine the tortuosity of a path formed by centroids of each plan of a binary 3D image along z-axis.
More...
#include <ImageViz/Engines/ImageAnalysis/GlobalMeasures/SoCentroidPathTortuosityQuantification3d.h>
Classes | |
| class | SbCentroidTortuosity3dDetail |
| Results details of centroid path tortuosity global measure. More... | |
Public Member Functions | |
| SoCentroidPathTortuosityQuantification3d () | |
Public Attributes | |
| SoSFImageDataAdapter | inBinaryImage |
| SoImageVizEngineAnalysisOutput < SbCentroidTortuosity3dDetail > | outResult |
Detailed Description
SoCentroidPathTortuosityQuantification3d engine the tortuosity of a path formed by centroids of each plan of a binary 3D image along z-axis.
Tortuosity is the ratio of the length of a curve to the distance between the ends of it along z-axis. In our case the distance between the ends of curve is given by the number of planes along z-axis.
This module first computes the centroid  of each plane
of each plane  of the image. Then it computes the path length through the centroids
of the image. Then it computes the path length through the centroids  and then divides it by the number of planes
and then divides it by the number of planes  along z-axis.
along z-axis.
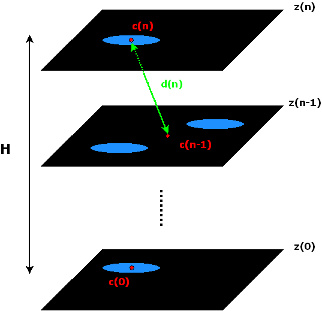
Centroid path tortuosity
FILE FORMAT/DEFAULT
- CentroidPathTortuosityQuantification3d {
| inBinaryImage | NULL |
Library references: tortuosity
Constructor & Destructor Documentation
| SoCentroidPathTortuosityQuantification3d::SoCentroidPathTortuosityQuantification3d | ( | ) |
Constructor.
Member Data Documentation
The input 3D binary image.
Default value is NULL. Supported types include: binary image.
| SoImageVizEngineAnalysisOutput<SbCentroidTortuosity3dDetail> SoCentroidPathTortuosityQuantification3d::outResult |
The output measure result.
Default value is NULL.
The documentation for this class was generated from the following file:
- ImageViz/Engines/ImageAnalysis/GlobalMeasures/SoCentroidPathTortuosityQuantification3d.h