SoMatchContrastProcessing Class Reference
[Grayscale Transforms]
 SoMatchContrastProcessing engine
More...
SoMatchContrastProcessing engine
More...
#include <ImageViz/Engines/ImageFiltering/GrayscaleTransforms/SoMatchContrastProcessing.h>
Public Types | |
| enum | MatchingMode { MEAN_VARIANCE = 0, HISTOGRAM = 1 } |
Public Member Functions | |
| SoMatchContrastProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFImageDataAdapter | inImage |
| SoSFImageDataAdapter | inReferenceImage |
| SoSFEnum | matchingMode |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
Detailed Description
SoMatchContrastProcessing engine
The SoMatchContrastProcessing engine computes a new image considering the dynamic of a reference one.
This engine computes a new image considering the dynamic of a reference one. The aim of this engine is to get an homogeneous dynamic when processing many images, in order to be able to easily apply the same process on all of them if the intensity information is required.
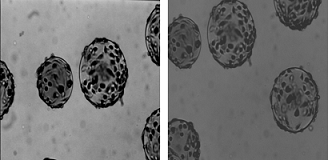
Figure 1: similar images with different dynamic, therefore hard to compare
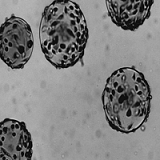
Figure 2: Applying Match Contrast to get the second image with a dynamic homogeneous to the first one.
There are two ways of computing the resulting image: either computing it from the information of mean and variance of the reference image, or from the histogram of the reference image.
SEE ALSO
SoHistogramEqualizationProcessing, SoBackgroundImageProcessing2d, SoMathematicalFunctionProcessing.
FILE FORMAT/DEFAULT
- MatchContrastProcessing {
| computeMode | MODE_AUTO |
| inImage | NULL |
| inReferenceImage | NULL |
| matchingMode | MEAN_VARIANCE |
Library references: adjustdynamic
Member Enumeration Documentation
Constructor & Destructor Documentation
| SoMatchContrastProcessing::SoMatchContrastProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input image.
Default value is NULL. Supported types include: grayscale color image.
The reference image.
Default value is NULL. Supported types include: grayscale binary label color image.
Select a matching mode.
Use enum MatchingMode. Default is MEAN_VARIANCE
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoMatchContrastProcessing::outImage |
The output image.
Default value is NULL. Supported types include: grayscale binary label color image.
The documentation for this class was generated from the following file:
- ImageViz/Engines/ImageFiltering/GrayscaleTransforms/SoMatchContrastProcessing.h