SoNagaoFilterProcessing2d Class Reference
[Smoothing And Denoising]
 SoNagaoFilterProcessing2d engine
More...
SoNagaoFilterProcessing2d engine
More...
#include <ImageViz/Engines/ImageFiltering/SmoothingAndDenoising/SoNagaoFilterProcessing2d.h>
Public Types | |
| enum | FilterType { TSUJI = 0, NAGAO7 = 1, NAGAO9 = 2, NAGMOD = 3 } |
| enum | FilterMethod { VARIANCE = 0, RANGE = 1 } |
Public Member Functions | |
| SoNagaoFilterProcessing2d () | |
Public Attributes | |
| SoSFImageDataAdapter | inImage |
| SoSFEnum | filterType |
| SoSFEnum | filterMethod |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
Detailed Description
SoNagaoFilterProcessing2d engine
The SoNagaoFilterProcessing2d engine computes a mean neighbors value around a central pixel.
For an introduction to image filters, see section Images Filters.
This engine uses an adaptive 5x5 neighborhood geometry to compute a mean neighbors value around a central pixel. For each pixel, the used geometry is selected, among a predefined set, with respect to a minimum variance criterion. User can optionally switch this criterion to a minimum range criterion.
Four neighborhood geometry types are supported by this filter:
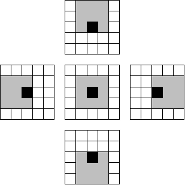
- The Tsuji-Tomita neighborhoods: a set of five 3x3 sub neighborhoods among the 5x5 main neighborhoods.
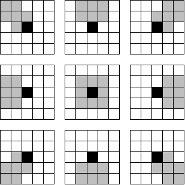
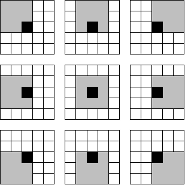
- The Nagao neighborhood with a set of nine 7 pixels sub neighborhoods among the 5x5 main neighborhoods:
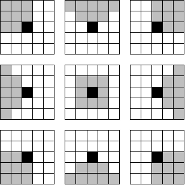
- The Nagao neighborhood with a set of nine 9 pixels sub neighborhoods among the 5x5 main neighborhoods:
- The Nagmod neighborhood: a set of nine 3x3 sub neighborhoods among the 5x5 main neighborhoods
SEE ALSO
SoBilateralFilterProcessing, SoSigmaFilterProcessing, SoUnsharpMaskingProcessing.
FILE FORMAT/DEFAULT
- NagaoFilterProcessing2d {
| inImage | NULL |
| filterType | TSUJI |
| filterMethod | VARIANCE |
Library references: nagaofilter
Member Enumeration Documentation
Constructor & Destructor Documentation
| SoNagaoFilterProcessing2d::SoNagaoFilterProcessing2d | ( | ) |
Constructor.
Member Data Documentation
Select the filter method.
Use enum FilterMethod. Default is VARIANCE
Select the filter type.
Use enum FilterType. Default is TSUJI
The input image.
Default value is NULL. Supported types include: grayscale binary label color image.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoNagaoFilterProcessing2d::outImage |
The output image.
Default value is NULL. Supported types include: grayscale binary label color image.
The documentation for this class was generated from the following file:
- ImageViz/Engines/ImageFiltering/SmoothingAndDenoising/SoNagaoFilterProcessing2d.h