SoTranslateProcessing Class Reference
[GeometricTransforms]
 SoTranslateProcessing engine
More...
SoTranslateProcessing engine
More...
#include <ImageViz/Engines/GeometryAndMatching/GeometricTransforms/SoTranslateProcessing.h>
Public Types | |
| enum | BackgroundMode { FIXED_BACKGROUND = 0, LOOPED_BACKGROUND = 1 } |
Public Member Functions | |
| SoTranslateProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFImageDataAdapter | inImage |
| SoSFVec3i32 | translationVector |
| SoSFEnum | backgroundMode |
| SoSFFloat | backgroundValue |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
Detailed Description
SoTranslateProcessing engine
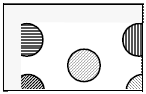
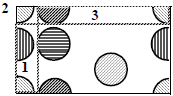
The SoTranslateProcessing engine re-assigns the position of the image on the grid according to user-defined vectors. During a translation, there are usually two phenomena: part of the image is out of the window, while another part has no values, as illustrated in Figure 1.
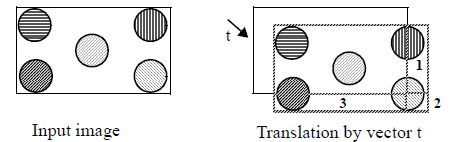
Figure 1: Translation of an image
A translation is denoted by a vector  . A pixel M of coordinates
. A pixel M of coordinates  is translated to the new coordinates in the output image as:
is translated to the new coordinates in the output image as:
![\[\left\{\begin{matrix}x'&=&t_x+x\\y'&=&t_y+y\\z'&=&t_z+z\end{matrix}\]](form_198.png)
or using matrix notation:
![\[\begin{bmatrix}x'\\y'\\z'\end{bmatrix} = \begin{bmatrix}t_x\\t_y\\t_z\end{bmatrix} + \begin{bmatrix}x\\y\\z\end{bmatrix}\]](form_199.png)
The output image is a discrete space of finite dimension where the new coordinates x, y and z may be outside the image.
NOTE: In 2D mode, z component is neglected.
FILE FORMAT/DEFAULT
- TranslateProcessing {
| computeMode | MODE_AUTO |
| inImage | NULL |
| translationVector | 100 100 100 |
| backgroundMode | FIXED_BACKGROUND |
| backgroundValue | 0.0f |
Library references: translate translate3d
Member Enumeration Documentation
There are two possible modes in a SoTranslateProcessing filter:.
- Enumerator:
Constructor & Destructor Documentation
| SoTranslateProcessing::SoTranslateProcessing | ( | ) |
Constructor.
Member Data Documentation
The translation mode.
Use enum BackgroundMode. Default is FIXED_BACKGROUND
Background value.
Default value is 0.0f.
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input image.
Default value is NULL. Supported types include: grayscale binary label color image.
The output image.
Default value is NULL. Supported types include: grayscale binary label color image.
The translation vector.
Default value is SbVec3i32(100,100,100).
The documentation for this class was generated from the following file:
- ImageViz/Engines/GeometryAndMatching/GeometricTransforms/SoTranslateProcessing.h