SoTriplePointsProcessing2d Class Reference
[Hit-Or-Miss And Skeleton]
 SoTriplePointsProcessing2d engine
More...
SoTriplePointsProcessing2d engine
More...
#include <ImageViz/Engines/MathematicalMorphology/HitOrMissAndSkeleton/SoTriplePointsProcessing2d.h>
Inheritance diagram for SoTriplePointsProcessing2d:
Public Member Functions | |
| SoTriplePointsProcessing2d () | |
Public Attributes | |
| SoSFImageDataAdapter | inBinaryImage |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outBinaryImage |
Detailed Description
SoTriplePointsProcessing2d engine
The SoTriplePointsProcessing2d engine is a point detector that selects triple points of a skeleton.
For an introduction to point detectors, see section Point detectors
The triple point of the skeleton are found by performing an HMT with the following configuration (up to a rotation):
![\[ \begin{array}{ccc} \times & 1 & \times\\ \times & 1 & \times\\ 1 & \times & 1 \end{array} ~~~~~~~ \begin{array}{ccc} 1 & \times & \times\\ \times & 1 & \times\\ 1 & \times & 1 \end{array} \]](form_596.png)
Segmentation of particles:
- In the figure below, it is possible to differentiate particles by counting their number of triple-points(in black) and their number of extremities(in grey).
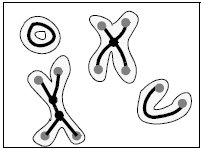
Skeleton, end-points, and triple-points
See also: SoSkeletonProcessing, SoEndPointsProcessing2d, SoIsolatedPointsProcessing2d.
FILE FORMAT/DEFAULT
- TriplePointsProcessing2d {
| inBinaryImage | NULL |
Library references: triple_points
Constructor & Destructor Documentation
| SoTriplePointsProcessing2d::SoTriplePointsProcessing2d | ( | ) |
Constructor.
Member Data Documentation
The input binary image.
Default value is NULL. Supported types include: binary color image.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoTriplePointsProcessing2d::outBinaryImage |
The output binary image.
Default value is NULL. Supported types include: binary image.
The documentation for this class was generated from the following file:
- ImageViz/Engines/MathematicalMorphology/HitOrMissAndSkeleton/SoTriplePointsProcessing2d.h