SoUltimateErosionProcessing Class Reference
[Geodesic Transformations]
 SoUltimateErosionProcessing engine
More...
SoUltimateErosionProcessing engine
More...
#include <ImageViz/Engines/MathematicalMorphology/GeodesicTransformations/SoUltimateErosionProcessing.h>
Public Member Functions | |
| SoUltimateErosionProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFEnum | neighborhood3d |
| SoSFImageDataAdapter | inBinaryImage |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outBinaryImage |
Detailed Description
SoUltimateErosionProcessing engine
The SoUltimateErosionProcessing engine computes the SoUltimateErosionProcessing eroded set.
For an introduction, see section Morphology.
This engine computes the SoUltimateErosionProcessing eroded set of the input image. Ultimate erosion consists of successive erosion of the image until all objects disappear ( images below). Then each erosion step is reconstructed into the previous erosion step (
images below). Then each erosion step is reconstructed into the previous erosion step ( image below). The difference between the eroded image and the reconstructed image is the centroid of objects which disappeared at the erosion step number
image below). The difference between the eroded image and the reconstructed image is the centroid of objects which disappeared at the erosion step number  .
.
This engine enables counting the number of convex particles, even if some of them are touching each other, as long as the pseudo-centre of each particle is outside of other particles.
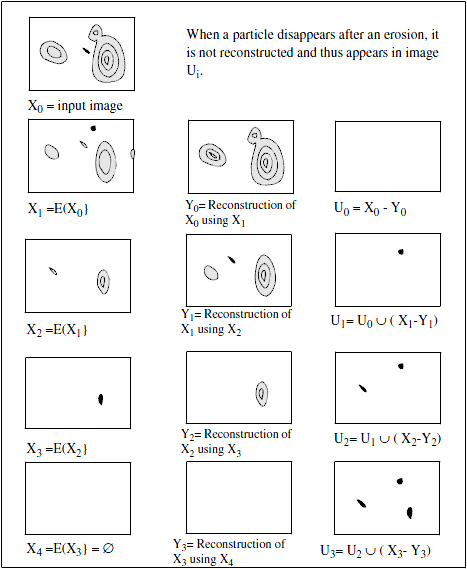
SoUltimateErosionProcessing on a basic example
SEE ALSO
SoBorderKillProcessing, SoReconstructionFromMarkersProcessing.
FILE FORMAT/DEFAULT
- UltimateErosionProcessing {
| computeMode | MODE_AUTO |
| neighborhood3d | CONNECTIVITY_26 |
| inBinaryImage | NULL |
Library references: ultimate
Constructor & Destructor Documentation
| SoUltimateErosionProcessing::SoUltimateErosionProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input binary image.
Default value is NULL. Supported types include: binary color image.
In 3D configuration (see computeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels.
Use enum Neighborhood3d. Default is CONNECTIVITY_26.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoUltimateErosionProcessing::outBinaryImage |
The output binary image.
Default value is NULL. Supported types include: binary image.
The documentation for this class was generated from the following file:
- ImageViz/Engines/MathematicalMorphology/GeodesicTransformations/SoUltimateErosionProcessing.h