SoChessboardDistanceMapProcessing Class Reference
[Distance Maps]
 SoChessboardDistanceMapProcessing engine
More...
SoChessboardDistanceMapProcessing engine
More...
#include <ImageViz/Engines/MathematicalMorphology/DistanceMaps/SoChessboardDistanceMapProcessing.h>
Public Member Functions | |
| SoChessboardDistanceMapProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFImageDataAdapter | inBinaryImage |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outMapImage |
Detailed Description
SoChessboardDistanceMapProcessing engine
The SoChessboardDistanceMapProcessing engine computes the chessboard distance transformation.
This engine is based upon a recursive method and work in two iterations. It is used for particle segmentation, before a Watershed engine.
This engine calculates the distance function of a binary image onto a gray level image, as the sum of successive erosions. The output image is a 16-bits signed image.
In the output image  , a voxel
, a voxel  belonging to a particle
belonging to a particle  , takes an intensity
, takes an intensity  equal to the distance in voxel units to the boundary. For a rectangular grid the distance is defined as:
equal to the distance in voxel units to the boundary. For a rectangular grid the distance is defined as:

Where denotes the so called Chessboard distance:

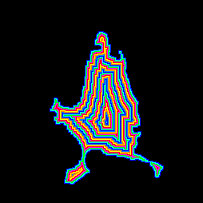
Output image for chessboard distance transformation
SEE ALSO
SoChamferDistanceMapProcessing2d.
FILE FORMAT/DEFAULT
- ChessboardDistanceMapProcessing {
| computeMode | MODE_AUTO |
| inBinaryImage | NULL |
Library references: distance
Constructor & Destructor Documentation
| SoChessboardDistanceMapProcessing::SoChessboardDistanceMapProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input binary image.
Default value is NULL. Supported types include: binary color image.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoChessboardDistanceMapProcessing::outMapImage |
The output distance map image.
Default value is NULL. Supported types include: grayscale binary label color image.
The documentation for this class was generated from the following file:
- ImageViz/Engines/MathematicalMorphology/DistanceMaps/SoChessboardDistanceMapProcessing.h