SoElasticRegistrationProcessing2d Class Reference
[GeometricTransforms, Registration]
 [PREVIEW] SoElasticRegistrationProcessing2d engine
More...
[PREVIEW] SoElasticRegistrationProcessing2d engine
More...
#include <ImageViz/Engines/GeometryAndMatching/Registration/SoElasticRegistrationProcessing2d.h>
Public Types | |
| enum | MetricType { EUCLIDEAN = 0 } |
Public Member Functions | |
| SoElasticRegistrationProcessing2d () | |
Public Attributes | |
| SoSFEnum | metricType |
| SoSFImageDataAdapter | inFixedImage |
| SoSFImageDataAdapter | inMovingImage |
| SoSFDouble | tolerance |
| SoSFVec2i32 | pyramidLevels |
| SoSFVec2f | elasticStandardDeviation |
| SoSFVec2f | fluidStandardDeviation |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outDisplacementField |
Detailed Description
[PREVIEW] SoElasticRegistrationProcessing2d engine
The SoElasticRegistrationProcessing2d engine computes the optimal elastic transformation to register a moving image on a fixed image.
Registration is a mapping technique between two images in order to compare it. The different registration algorithms depend on the type of transformation that will be applied on the moving image.
SoElasticRegistrationProcessing2d class computes the optimal elastic transformation to register a moving image on a fixed image.
The main output of the algorithm is a displacement image representing the computed transformation. Each pixel of this image contains two values: a displacement to apply in x direction and an other to apply in y direction on the corresponding pixel of the moving image to be registered on the fixed image.
The SoElasticRegistrationProcessing2d implementation relies on the non-rigid registration demon algorithm, it is detailed in the publication:
Jean-Philippe Thirion. Image matching as a diffusion process: an analogy with Maxwellâs demons. Medical Image Analysis, Elsevier, 1998, 2 (3), pp.243â260
SoElasticRegistrationProcessing2d has two levels of regularization: fluid and elastic. The fluid regularization corresponds to the forces field regularization and the elastic one corresponds to the displacement field regularization.
The forces field is an elementary displacement which is iteratively added to the current displacement field during the registration procedure. This forces field tends to decrease the similarity measure between the 2 images.
The coarsest and the finest resolution levels of the multi-resolution can be user-defined. The registration is evaluated at the coarsest level first and then iteratively at each level until the finest one. The higher finest level, the faster the computation is. The lower finest level, the more accurate the registration is.
The multi-resolution approach prevents the optimization procedure from falling into a local extrema and also speeds up the calculation.
SoElasticRegistrationProcessing2d also proposes a multi-resolution approach.
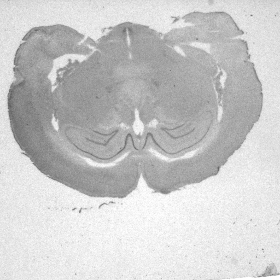
(a) | 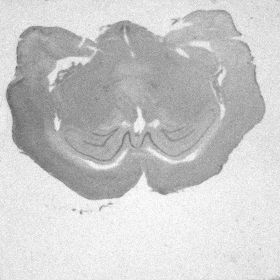
(b) | 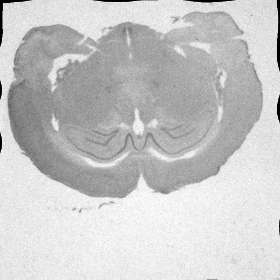
(c) |
FILE FORMAT/DEFAULT
- ElasticRegistrationProcessing2d {
| metricType | EUCLIDEAN |
| inFixedImage | NULL |
| inMovingImage | NULL |
| tolerance | 0.025 |
| pyramidLevels | 2 0 |
| elasticStandardDeviation | 10.0f 10.0f |
| fluidStandardDeviation | 10.0f 10.0f |
Library references: ElasticRegistration2d
- See related examples:
Member Enumeration Documentation
Constructor & Destructor Documentation
| SoElasticRegistrationProcessing2d::SoElasticRegistrationProcessing2d | ( | ) |
Constructor.
Member Data Documentation
The standard deviation in pixel of the gaussian kernel used to smooth the displacement field at each iteration.
Default value is SbVec2f(10.0f,10.0f).
The standard deviation in pixel of the gaussian kernel used to smooth the forces field at each iteration.
This parameter value is critical to reach large displacements. Default value is SbVec2f(10.0f,10.0f).
The reference image on which the moving image has to be registered.
Default value is NULL. Supported types include: grayscale image.
The input model image to be registered.
Default value is NULL. Supported types include: grayscale image.
Type of metric used to measure the similarity/dissimilarity between the fixed and the transformed image.
Only Euclidean metric is currently available. Use enum MetricType. Default is EUCLIDEAN
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoElasticRegistrationProcessing2d::outDisplacementField |
The displacement field that maps a pixel of the moving image onto the corresponding pixel in the fixed image.
Each pixel of the displacement field image contains 2 values: a displacement in x direction and one in y direction. outDisplacementField is a 2D displacement field (2 spectral components) with floating point precision (32 bits). Default value is NULL. Supported types include: grayscale color image.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoElasticRegistrationProcessing2d::outImage |
The inMovingImage transformed by the output displacement field.
The image is in gray level. The output image has the same type than the input image which is registered. Default value is NULL. Supported types include: grayscale image.
A 2-dimensional vector: first coordinate is the coarsest resolution, second coordinate is the finest resolution.
0 corresponds to the full resolution and N corresponds to a resolution of  Default value is SbVec2i32(2,0).
Default value is SbVec2i32(2,0).
Maximum relative variation of the metric to stop the process.
This variation is recomputed at each iteration. Default value is 0.025.
The documentation for this class was generated from the following file:
- ImageViz/Engines/GeometryAndMatching/Registration/SoElasticRegistrationProcessing2d.h