SoGeodesicDistanceMapProcessing Class Reference
[Distance Maps]
 SoGeodesicDistanceMapProcessing engine
More...
SoGeodesicDistanceMapProcessing engine
More...
#include <ImageViz/Engines/MathematicalMorphology/DistanceMaps/SoGeodesicDistanceMapProcessing.h>
Public Member Functions | |
| SoGeodesicDistanceMapProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFImageDataAdapter | inBinaryImage |
| SoSFImageDataAdapter | inMaskImage |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outMapImage |
Detailed Description
SoGeodesicDistanceMapProcessing engine
The SoGeodesicDistanceMapProcessing engine computes the Chamfer distance using a mask of forbidden areas.
This engine is like the SoChamferDistanceMapProcessing2d and SoChamferDistanceMapProcessing3d engines but uses mask to forbidden areas. This engine is very useful when obstacles are present in the image and should not be taken into account in the distance map.
Sample: Distance porosity measure.
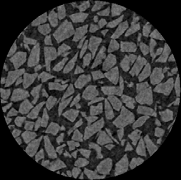
Figure 1: Initial image
Figure 2: Mask of the object | 
Figure 3: Mask of the material |
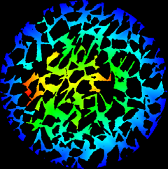
Figure 4 | 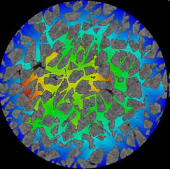
Figure 5 |
(taken the outside of object as the starting point of the distance map)
SEE ALSO
SoChamferDistanceMapProcessing3d, SoChamferDistanceMapProcessing2d.
FILE FORMAT/DEFAULT
- GeodesicDistanceMapProcessing {
| computeMode | MODE_AUTO |
| inBinaryImage | NULL |
| inMaskImage | NULL |
Library references: distmask
Constructor & Destructor Documentation
| SoGeodesicDistanceMapProcessing::SoGeodesicDistanceMapProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input binary image.
Default value is NULL. Supported types include: binary color image.
The binary image for the forbidden area (compute distance only outside).
Default value is NULL. Supported types include: binary color image.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoGeodesicDistanceMapProcessing::outMapImage |
The output distance map image.
Default value is NULL. Supported types include: grayscale binary label color image.
The documentation for this class was generated from the following file:
- ImageViz/Engines/MathematicalMorphology/DistanceMaps/SoGeodesicDistanceMapProcessing.h