SoHExtremaProcessing Class Reference
[Geodesic Transformations]
 SoHExtremaProcessing engine
More...
SoHExtremaProcessing engine
More...
#include <ImageViz/Engines/MathematicalMorphology/GeodesicTransformations/SoHExtremaProcessing.h>
Public Types | |
| enum | RegionalOperator { MINIMA = 0, MAXIMA = 1 } |
Public Member Functions | |
| SoHExtremaProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFEnum | neighborhood3d |
| SoSFEnum | regionalOperator |
| SoSFImageDataAdapter | inImage |
| SoSFInt32 | contrast |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outBinaryImage |
Detailed Description
SoHExtremaProcessing engine
The SoHExtremaProcessing engine merges the regional minima or maxima.
This engine merges regional minima or maxima based on a contrast coefficient criterion h. It is useful for filtering noisy minima or maxima sets. It can also be used as particle markers in various algorithms, e.g. watershed detection.
Case Minima
The input is added to the contrast coefficient h, then a SoExtremaImpositionProcessing (case Erosion) is performed on the result of the addition.
The regional minima of the reconstructed image are called the H-Minima.
Case Maxima
The input is subtracted from the contrast coefficient h, then a SoExtremaImpositionProcessing (case Dilation) is performed on the result of the subtraction.
The regional maxima of the reconstructed image are called the H-Maxima.
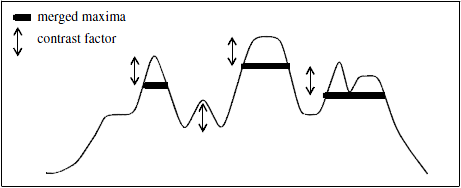
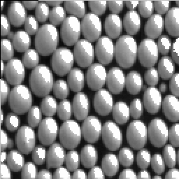
Input image and, in white, its merged maxima (factor 60)
SEE ALSO
SoRegionalExtremaProcessing, SoGrayscaleResconstructionProcessing.
FILE FORMAT/DEFAULT
- HExtremaProcessing {
| computeMode | MODE_AUTO |
| neighborhood3d | CONNECTIVITY_26 |
| regionalOperator | MAXIMA |
| inImage | NULL |
| contrast | 4 |
Library references: merge_maxima merge_minima
Member Enumeration Documentation
Constructor & Destructor Documentation
| SoHExtremaProcessing::SoHExtremaProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The contrast.
Default value is 4.
The input image.
Default value is NULL. Supported types include: grayscale image.
In 3D configuration (see computeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels.
Use enum Neighborhood3d. Default is CONNECTIVITY_26.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoHExtremaProcessing::outBinaryImage |
The output binary image.
Default value is NULL. Supported types include: binary image.
Select the operator.
Use enum RegionalOperator. Default is MAXIMA
The documentation for this class was generated from the following file:
- ImageViz/Engines/MathematicalMorphology/GeodesicTransformations/SoHExtremaProcessing.h