SoHistogramEqualizationProcessing Class Reference
[Grayscale Transforms]
 SoHistogramEqualizationProcessing engine
More...
SoHistogramEqualizationProcessing engine
More...
#include <ImageViz/Engines/ImageFiltering/GrayscaleTransforms/SoHistogramEqualizationProcessing.h>
Public Types | |
| enum | RangeMode { MIN_MAX = 0, OTHER = 1 } |
Public Member Functions | |
| SoHistogramEqualizationProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFImageDataAdapter | inImage |
| SoSFEnum | rangeMode |
| SoSFVec2i32 | intensityRangeInput |
| SoSFVec2i32 | intensityRangeOutput |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
Detailed Description
SoHistogramEqualizationProcessing engine
The SoHistogramEqualizationProcessing engine performs a histogram equalization.
This engine performs a histogram equalization of image I onto image O. For example, if an image contains n pixels and uses M gray values, there is an average of n/M pixels per gray level. An image is correctly contrasted if the number of pixels is closed to this mean value for each gray level value.
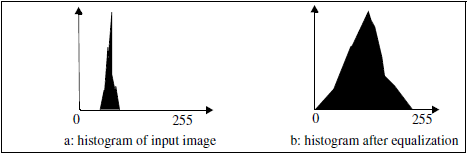
The aim of histogram equalization is to transform the histogram to make it uniform. In Figure a, the histogram is very condensed, and the image is poorly contrasted. In Figure b, the histogram is more widely distributed, and the image has a better contrast.
Histogram equalization
SEE ALSO
SoMatchContrastProcessing, SoBackgroundImageProcessing2d, SoMathematicalFunctionProcessing.
FILE FORMAT/DEFAULT
- HistogramEqualizationProcessing {
| computeMode | MODE_AUTO |
| inImage | NULL |
| rangeMode | MIN_MAX |
| intensityRangeInput | 0 255 |
| intensityRangeOutput | 0 255 |
Library references: equalize
Member Enumeration Documentation
Constructor & Destructor Documentation
| SoHistogramEqualizationProcessing::SoHistogramEqualizationProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input image.
Default value is NULL. Supported types include: grayscale binary label image.
The input intensity range.
Default value is SbVec2i32(0,255).
The output intensity range.
Default value is SbVec2i32(0,255).
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoHistogramEqualizationProcessing::outImage |
The output image.
Default value is NULL. Supported types include: grayscale binary label color image.
Select the input intensity range mode.
Use enum RangeMode. Default is MIN_MAX
The documentation for this class was generated from the following file:
- ImageViz/Engines/ImageFiltering/GrayscaleTransforms/SoHistogramEqualizationProcessing.h