SoRescaleIntensityProcessing Class Reference
[Grayscale Transforms]
 SoRescaleIntensityProcessing engine
More...
SoRescaleIntensityProcessing engine
More...
#include <ImageViz/Engines/ImageFiltering/GrayscaleTransforms/SoRescaleIntensityProcessing.h>
Public Types | |
| enum | OutputType { UNSIGNED_INTEGER_8_BIT = 0, UNSIGNED_INTEGER_16_BIT = 1, SIGNED_INTEGER_8_BIT = 3, SIGNED_INTEGER_16_BIT = 4, SIGNED_INTEGER_32_BIT = 5, FLOAT_32_BIT = 6, SAME_AS_INPUT = 8 } |
| enum | RangeMode { MIN_MAX = 0, OTHER = 1 } |
Public Member Functions | |
| SoRescaleIntensityProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFImageDataAdapter | inImage |
| SoSFEnum | outputType |
| SoSFEnum | rangeMode |
| SoSFVec2f | intensityRangeInput |
| SoSFVec2f | intensityRangeOutput |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
Detailed Description
SoRescaleIntensityProcessing engine
The SoRescaleIntensityProcessing engine performs a linear scaling of the gray level values of an image.
This engine performs a linear scaling of the gray level values of an image to a user-specified interval. It may be applied to images with a gray level range other than [0, 255], and for short or floating point images. In Figure , the input gray levels of interest are in the user-specified interval [a, b], and the output range is the interval [c, d].
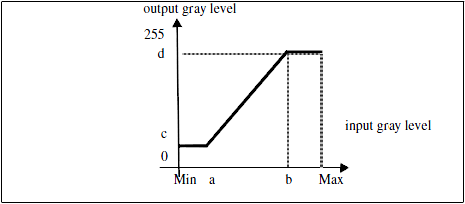
The normalize transformation
The input image is I, and the output image is O. Let [a, b] be the input range and [c, d] the output range, then:
![\[\begin{array}{ll} O(n,m)=c & ~\mbox{if $I(n,m) \leq a$}\\ O(n,m)=\left(\frac{d-c}{b-a}\right)(I(n,m)-a)+c & ~\mbox{if $a < I(n,m) \leq b$}\\ O(n,m)=d & ~\mbox{if $I(n,m) > b$}\end{array}\]](form_439.png)
SEE ALSO
SoMatchContrastProcessing, SoBackgroundImageProcessing2d, SoMathematicalFunctionProcessing.
FILE FORMAT/DEFAULT
- RescaleIntensityProcessing {
| computeMode | MODE_AUTO |
| inImage | NULL |
| outputType | SAME_AS_INPUT |
| rangeMode | MIN_MAX |
| intensityRangeInput | 0.0f 255.0f |
| intensityRangeOutput | 0.0f 255.0f |
Library references: RescaleIntensity
Member Enumeration Documentation
Constructor & Destructor Documentation
| SoRescaleIntensityProcessing::SoRescaleIntensityProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input image.
Default value is NULL. Supported types include: grayscale binary label color image.
The input intensity range.
Default value is SbVec2f(0.0f,255.0f).
The output intensity range.
Default value is SbVec2f(0.0f,255.0f).
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoRescaleIntensityProcessing::outImage |
The output image.
Default value is NULL. Supported types include: grayscale binary label color image.
Type of the output image.
Use enum OutputType. Default is SAME_AS_INPUT
Select the input intensity range mode.
Use enum RangeMode. Default is MIN_MAX
The documentation for this class was generated from the following file:
- ImageViz/Engines/ImageFiltering/GrayscaleTransforms/SoRescaleIntensityProcessing.h