Class SoElasticRegistrationProcessing2d
- java.lang.Object
-
- com.openinventor.inventor.Inventor
-
- com.openinventor.inventor.misc.SoBase
-
- com.openinventor.inventor.fields.SoFieldContainer
-
- com.openinventor.inventor.engines.SoEngine
-
- com.openinventor.imageviz.engines.SoImageVizEngine
-
- com.openinventor.imageviz.engines.geometryandmatching.registration.SoElasticRegistrationProcessing2d
-
- All Implemented Interfaces:
SafeDisposable
public class SoElasticRegistrationProcessing2d extends SoImageVizEngine
(Preview Feature)SoElasticRegistrationProcessing2denginePreview Feature means this class is fully supported and can be used in Open Inventor applications. Being tagged as a Preview Feature just means that the implementation is still subject to API changes and adjustments based on feedback from early adopters. Please be also aware that source compatibility might be broken regardless of the Open Inventor compatibility changes policy due to our commitment to bring needed changes to be sure the specifications of this Preview Feature match the expectations of our customers.
TheSoElasticRegistrationProcessing2dengine computes the optimal elastic transformation to register a moving image on a fixed image.Registration is a mapping technique between two images in order to compare it. The different registration algorithms depend on the type of transformation that will be applied on the moving image.
SoElasticRegistrationProcessing2dclass computes the optimal elastic transformation to register a moving image on a fixed image.The main output of the algorithm is a displacement image representing the computed transformation. Each pixel of this image contains two values: a displacement to apply in x direction and an other to apply in y direction on the corresponding pixel of the moving image to be registered on the fixed image.
The
SoElasticRegistrationProcessing2dimplementation relies on the non-rigid registration demon algorithm, it is detailed in the publication:Jean-Philippe Thirion. Image matching as a diffusion process: an analogy with Maxwell’s demons. Medical Image Analysis, Elsevier, 1998, 2 (3), pp.243–260
SoElasticRegistrationProcessing2dhas two levels of regularization: fluid and elastic. The fluid regularization corresponds to the forces field regularization and the elastic one corresponds to the displacement field regularization.The forces field is an elementary displacement which is iteratively added to the current displacement field during the registration procedure. This forces field tends to decrease the similarity measure between the 2 images.
The coarsest and the finest resolution levels of the multi-resolution can be user-defined. The registration is evaluated at the coarsest level first and then iteratively at each level until the finest one. The higher finest level, the faster the computation is. The lower finest level, the more accurate the registration is.
The multi-resolution approach prevents the optimization procedure from falling into a local extrema and also speeds up the calculation.
SoElasticRegistrationProcessing2dalso proposes a multi-resolution approach.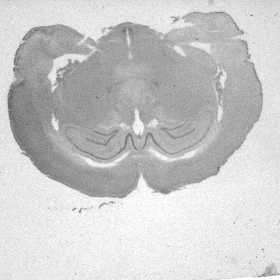
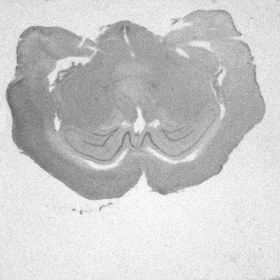
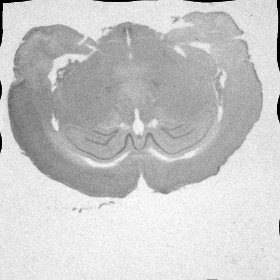
(a) Original image. (b) Artificially distorted image. (c) Registered image. File format/default:
ElasticRegistrationProcessing2d {
metricType EUCLIDEAN inFixedImage NULL inMovingImage NULL tolerance 0.025 pyramidLevels 2 0 elasticStandardDeviation 10.0f 10.0f fluidStandardDeviation 10.0f 10.0f
Library references: ElasticRegistration2d
-
-
Nested Class Summary
Nested Classes Modifier and Type Class Description static classSoElasticRegistrationProcessing2d.MetricTypesThis enumeration handles all type of supported metric.-
Nested classes/interfaces inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
SoImageVizEngine.ComputeModes, SoImageVizEngine.EventArg, SoImageVizEngine.Neighborhood3ds
-
Nested classes/interfaces inherited from class com.openinventor.inventor.Inventor
Inventor.ConstructorCommand
-
-
Field Summary
Fields Modifier and Type Field Description SoSFVec2felasticStandardDeviationThe standard deviation in pixel of the gaussian kernel used to smooth the displacement field at each iteration.SoSFVec2ffluidStandardDeviationThe standard deviation in pixel of the gaussian kernel used to smooth the forces field at each iteration.SoSFImageDataAdapterinFixedImageThe reference image on which the moving image has to be registered.SoSFImageDataAdapterinMovingImageThe input model image to be registered.SoSFEnum<SoElasticRegistrationProcessing2d.MetricTypes>metricTypeType of metric used to measure the similarity/dissimilarity between the fixed and the transformed image.SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter>outDisplacementFieldThe displacement field that maps a pixel of the moving image onto the corresponding pixel in the fixed image.SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter>outImageTheinMovingImagetransformed by the output displacement field.SoSFVec2i32pyramidLevelsA 2-dimensional vector: first coordinate is the coarsest resolution, second coordinate is the finest resolution.SoSFDoubletoleranceMaximum relative variation of the metric to stop the process.-
Fields inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
onBegin, onEnd, onProgress
-
Fields inherited from class com.openinventor.inventor.Inventor
VERBOSE_LEVEL, ZeroHandle
-
-
Constructor Summary
Constructors Constructor Description SoElasticRegistrationProcessing2d()Constructor.
-
Method Summary
-
Methods inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
abortEvaluate, isEvaluating, startEvaluate, waitEvaluate
-
Methods inherited from class com.openinventor.inventor.engines.SoEngine
copy, getByName, getOutput, getOutputName
-
Methods inherited from class com.openinventor.inventor.fields.SoFieldContainer
copyFieldValues, copyFieldValues, enableNotify, fieldsAreEqual, get, getAllFields, getEventIn, getEventOut, getField, getFieldName, hasDefaultValues, isNotifyEnabled, set, setToDefaults
-
Methods inherited from class com.openinventor.inventor.misc.SoBase
dispose, getName, isDisposable, isSynchronizable, setName, setSynchronizable, touch
-
Methods inherited from class com.openinventor.inventor.Inventor
getNativeResourceHandle
-
-
-
-
Field Detail
-
metricType
public final SoSFEnum<SoElasticRegistrationProcessing2d.MetricTypes> metricType
Type of metric used to measure the similarity/dissimilarity between the fixed and the transformed image. Only Euclidean metric is currently available. . Default is EUCLIDEAN
-
inFixedImage
public final SoSFImageDataAdapter inFixedImage
The reference image on which the moving image has to be registered. Default value is NULL. Supported types include: grayscale image.
-
inMovingImage
public final SoSFImageDataAdapter inMovingImage
The input model image to be registered. Default value is NULL. Supported types include: grayscale image.
-
tolerance
public final SoSFDouble tolerance
Maximum relative variation of the metric to stop the process. This variation is recomputed at each iteration. Default value is 0.025.
-
pyramidLevels
public final SoSFVec2i32 pyramidLevels
A 2-dimensional vector: first coordinate is the coarsest resolution, second coordinate is the finest resolution. 0 corresponds to the full resolution and N corresponds to a resolution of Default value is
Default value is SbVec2i32(2,0).
-
elasticStandardDeviation
public final SoSFVec2f elasticStandardDeviation
The standard deviation in pixel of the gaussian kernel used to smooth the displacement field at each iteration. Default value isSbVec2f(10.0f,10.0f).
-
fluidStandardDeviation
public final SoSFVec2f fluidStandardDeviation
The standard deviation in pixel of the gaussian kernel used to smooth the forces field at each iteration. This parameter value is critical to reach large displacements. Default value isSbVec2f(10.0f,10.0f).
-
outImage
public final SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter> outImage
TheinMovingImagetransformed by the output displacement field. The image is in gray level. The output image has the same type than the input image which is registered. Default value is NULL. Supported types include: grayscale image.
-
outDisplacementField
public final SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter> outDisplacementField
The displacement field that maps a pixel of the moving image onto the corresponding pixel in the fixed image. Each pixel of the displacement field image contains 2 values: a displacement in x direction and one in y direction. outDisplacementField is a 2D displacement field (2 spectral components) with floating point precision (32 bits). Default value is NULL. Supported types include: grayscale color image.
-
-