|
Open Inventor Release 2023.2.3
|
|

| |
|
Open Inventor Release 2023.2.3
|
|
|
| |
 The SoEigenDecompositionProcessing3d engine computes the local eigenvectors and eigenvalues of a 3D matrix image.
More...
The SoEigenDecompositionProcessing3d engine computes the local eigenvectors and eigenvalues of a 3D matrix image.
More...
#include <ImageViz/Engines/ArithmeticAndLogic/ArithmeticOperations/SoEigenDecompositionProcessing3d.h>
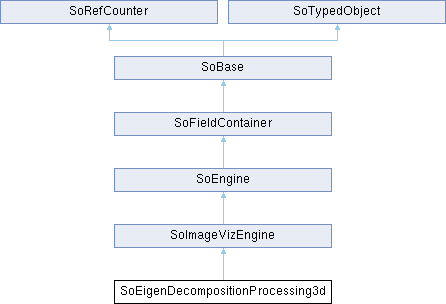
 Inheritance diagram for SoEigenDecompositionProcessing3d:
Inheritance diagram for SoEigenDecompositionProcessing3d:Public Types | |
| enum | OutputSelection { EIGEN_VECTOR_1 = 1 , EIGEN_VECTOR_2 = 2 , EIGEN_VECTOR_3 = 4 , EIGEN_VALUES = 8 } |
| This enum defines the different outputs that can be selected. More... | |
| Public Types inherited from SoImageVizEngine | |
| enum | ComputeMode { MODE_2D = 0 , MODE_3D = 1 , MODE_AUTO = 2 } |
| Compute Mode This enum specifies whether the main input will be interpreted as a 3D volume or a stack of 2D images for processing. More... | |
| enum | Neighborhood3d { CONNECTIVITY_6 = 0 , CONNECTIVITY_18 = 1 , CONNECTIVITY_26 = 2 } |
| Neighborhood Connectivity 3D. More... | |
Public Member Functions | |
| SoEigenDecompositionProcessing3d () | |
| Constructor. | |
| Public Member Functions inherited from SoImageVizEngine | |
| virtual SoType | getTypeId () const |
| Returns the type identifier for this specific instance. | |
| virtual void | startEvaluate () |
| Evaluate engine and dependencies in another thread without blocking the current one. | |
| virtual void | waitEvaluate () |
| Wait for the end of engine evaluation. | |
| virtual void | abortEvaluate () |
| Abort current processing as soon as possible. | |
| virtual bool | isEvaluating () |
| Returns true if the engine evaluation is in progress. | |
| Public Member Functions inherited from SoEngine | |
| virtual int | getOutputs (SoEngineOutputList &list) const |
| Returns a list of outputs in this engine. | |
| SoEngineOutput * | getOutput (const SbName &outputName) const |
| Returns a reference to the engine output with the given name. | |
| SbBool | getOutputName (const SoEngineOutput *output, SbName &outputName) const |
| Returns (in outputName) the name of the engine output (output). | |
| SoEngine * | copy () const |
| Creates and returns an exact copy of the engine. | |
| Public Member Functions inherited from SoFieldContainer | |
| void | setToDefaults () |
| Sets all fields in this object to their default values. | |
| SbBool | hasDefaultValues () const |
| Returns TRUE if all of the object's fields have their default values. | |
| SbBool | fieldsAreEqual (const SoFieldContainer *fc) const |
| Returns TRUE if this object's fields are exactly equal to fc's fields. | |
| void | copyFieldValues (const SoFieldContainer *fc, SbBool copyConnections=FALSE) |
| Copies the contents of fc's fields into this object's fields. | |
| SoNONUNICODE SbBool | set (const char *fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| SbBool | set (const SbString &fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| void | get (SbString &fieldDataString) |
| Returns the values of the fields of this object in the Open Inventor ASCII file format in the given string. | |
| virtual int | getFields (SoFieldList &list) const |
| Appends references to all of this object's fields to resultList, and returns the number of fields appended. | |
| virtual int | getAllFields (SoFieldList &list) const |
| Returns a list of fields, including the eventIn's and eventOut's. | |
| virtual SoField * | getField (const SbName &fieldName) const |
| Returns a the field of this object whose name is fieldName. | |
| virtual SoField * | getEventIn (const SbName &fieldName) const |
| Returns a the eventIn with the given name. | |
| virtual SoField * | getEventOut (const SbName &fieldName) const |
| Returns the eventOut with the given name. | |
| SbBool | getFieldName (const SoField *field, SbName &fieldName) const |
| Returns the name of the given field in the fieldName argument. | |
| SbBool | enableNotify (SbBool flag) |
| Notification at this Field Container is enabled (if flag == TRUE) or disabled (if flag == FALSE). | |
| SbBool | isNotifyEnabled () const |
| Notification is the process of telling interested objects that this object has changed. | |
| virtual void | setUserData (void *data) |
| Sets application data. | |
| void * | getUserData (void) const |
| Gets user application data. | |
| Public Member Functions inherited from SoBase | |
| virtual void | touch () |
| Marks an instance as modified, simulating a change to it. | |
| virtual SbName | getName () const |
| Returns the name of an instance. | |
| virtual void | setName (const SbName &name) |
| Sets the name of an instance. | |
| void | setSynchronizable (const bool b) |
| Sets this to be a ScaleViz synchronizable object. | |
| bool | isSynchronizable () const |
| Gets the ScaleViz synchronizable state of this object. | |
| Public Member Functions inherited from SoRefCounter | |
| void | ref () const |
| Adds a reference to an instance. | |
| void | unref () const |
| Removes a reference from an instance. | |
| void | unrefNoDelete () const |
| unrefNoDelete() should be called when it is desired to decrement the reference count, but not delete the instance if this brings the reference count to zero. | |
| int | getRefCount () const |
| Returns current reference count. | |
| void | lock () const |
| lock this instance. | |
| void | unlock () const |
| unlock this instance. | |
| Public Member Functions inherited from SoTypedObject | |
| SbBool | isOfType (const SoType &type) const |
| Returns TRUE if this object is of the type specified in type or is derived from that type. | |
| template<typename TypedObjectClass > | |
| SbBool | isOfType () const |
| Returns TRUE if this object is of the type of class TypedObjectClass or is derived from that class. | |
Public Attributes | |
| SoSFImageDataAdapter | inSymmetricMatrixImage |
| A matrix image containing symmetric 3x3 matrices. | |
| SoSFBitMask | outputSelection |
| Enable computation of selected outputs. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outEigenVector1Image |
| Eigenvector image containing the largest eigen value. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outEigenVector2Image |
| Eigenvector image containing the medium eigen value. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outEigenVector3Image |
| Eigenvector image containing the smallest eigen value. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outEigenValuesImage |
| Eigenvalues image. | |
| Public Attributes inherited from SoImageVizEngine | |
| SbEventHandler< EventArg & > | onBegin |
| Event raised when the processing begins. | |
| SbEventHandler< EventArg & > | onEnd |
| Event raised when processing ends and the result is available. | |
| SbEventHandler< EventArg & > | onProgress |
| Event raised while processing is running. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SoImageVizEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
| Static Public Member Functions inherited from SoEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for the SoEngine class. | |
| static SoEngine * | getByName (const SbName &name) |
| Looks up engine(s) by name. | |
| static int | getByName (const SbName &name, SoEngineList &list) |
| Looks up engine(s) by name. | |
| Static Public Member Functions inherited from SoFieldContainer | |
| static SoType | getClassTypeId () |
| Returns the type of this class. | |
| Static Public Member Functions inherited from SoBase | |
| static SoType | getClassTypeId () |
| Returns type identifier for this class. | |
| Static Public Member Functions inherited from SoTypedObject | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
The SoEigenDecompositionProcessing3d engine computes the local eigenvectors and eigenvalues of a 3D matrix image.
The input image must have six channels, where each channel contains one of the unique components of a 3x3 symmetric matrix. (The redundant components are not necessary.) This engine creates output images containing the eigenvectors and/or eigenvalues of the input matrix image.
Let 







where 


SoEigenDecompositionProcessing2d, SoHessianMatrixProcessing2d, SoHessianMatrixProcessing3d
| inSymmetricMatrixImage | NULL |
| outputSelection | EIGEN_VECTOR_1 | EIGEN_VECTOR_2 | EIGEN_VECTOR_3 | EIGEN_VALUES |
Definition at line 74 of file SoEigenDecompositionProcessing3d.h.
This enum defines the different outputs that can be selected.
Definition at line 92 of file SoEigenDecompositionProcessing3d.h.
| SoEigenDecompositionProcessing3d::SoEigenDecompositionProcessing3d | ( | ) |
Constructor.
| SoSFImageDataAdapter SoEigenDecompositionProcessing3d::inSymmetricMatrixImage |
A matrix image containing symmetric 3x3 matrices.
The image type must be float. The number of channels must be 6 in the following order 

Default value is NULL. Supported types include: grayscale color image.
Definition at line 87 of file SoEigenDecompositionProcessing3d.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoEigenDecompositionProcessing3d::outEigenValuesImage |
Eigenvalues image.
The IJK dimensions of the output image are the same as the input but the number of channels is 3 (channel 0 = largest Eigen value, channel 1 = medium Eigen value, channel 2 = smallest Eigen value). The calibration (voxel size, origin, orientation) is forced to the same values as the input. The voxel type is forced to float. Default value is NULL. Supported types include: grayscale binary label color image.
Definition at line 146 of file SoEigenDecompositionProcessing3d.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoEigenDecompositionProcessing3d::outEigenVector1Image |
Eigenvector image containing the largest eigen value.
The IJK dimensions of the output image are the same as the input but the number of channels is 3 (channel 0 = x, channel 1 = y, channel 2 = z). The calibration (voxel size, origin, orientation) is forced to the same values as the input. The voxel type is forced to float. Default value is NULL. Supported types include: grayscale binary label color image.
Definition at line 122 of file SoEigenDecompositionProcessing3d.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoEigenDecompositionProcessing3d::outEigenVector2Image |
Eigenvector image containing the medium eigen value.
The IJK dimensions of the output image are the same as the input but the number of channels is 3 (channel 0 = x, channel 1 = y, channel 2 = z). The calibration (voxel size, origin, orientation) is forced to the same values as the input. The voxel type is forced to float. Default value is NULL. Supported types include: grayscale binary label color image.
Definition at line 130 of file SoEigenDecompositionProcessing3d.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoEigenDecompositionProcessing3d::outEigenVector3Image |
Eigenvector image containing the smallest eigen value.
The IJK dimensions of the output image are the same as the input but the number of channels is 3 (channel 0 = x, channel 1 = y, channel 2 = z). The calibration (voxel size, origin, orientation) is forced to the same values as the input. The voxel type is forced to float. Default value is NULL. Supported types include: grayscale binary label color image.
Definition at line 138 of file SoEigenDecompositionProcessing3d.h.
| SoSFBitMask SoEigenDecompositionProcessing3d::outputSelection |
Enable computation of selected outputs.
Use enum OutputSelection. Default is EIGEN_VECTOR_1 | EIGEN_VECTOR_2 | EIGEN_VECTOR_3 | EIGEN_VALUES
Definition at line 114 of file SoEigenDecompositionProcessing3d.h.