|
Open Inventor Release 2023.2.3
|
|

| |
|
Open Inventor Release 2023.2.3
|
|
|
| |
 (Preview feature) SoElasticRegistrationProcessing2d engine
More...
(Preview feature) SoElasticRegistrationProcessing2d engine
More...
#include <ImageViz/Engines/GeometryAndMatching/Registration/SoElasticRegistrationProcessing2d.h>
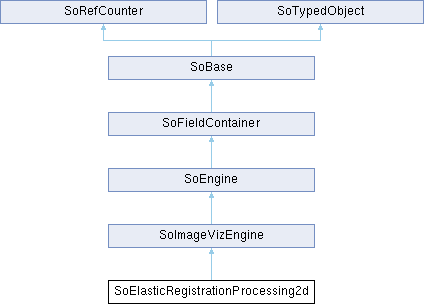
 Inheritance diagram for SoElasticRegistrationProcessing2d:
Inheritance diagram for SoElasticRegistrationProcessing2d:Public Types | |
| enum | MetricType { EUCLIDEAN = 0 } |
| This enumeration handles all type of supported metric. More... | |
| Public Types inherited from SoImageVizEngine | |
| enum | ComputeMode { MODE_2D = 0 , MODE_3D = 1 , MODE_AUTO = 2 } |
| Compute Mode This enum specifies whether the main input will be interpreted as a 3D volume or a stack of 2D images for processing. More... | |
| enum | Neighborhood3d { CONNECTIVITY_6 = 0 , CONNECTIVITY_18 = 1 , CONNECTIVITY_26 = 2 } |
| Neighborhood Connectivity 3D. More... | |
Public Member Functions | |
| SoElasticRegistrationProcessing2d () | |
| Constructor. | |
| Public Member Functions inherited from SoImageVizEngine | |
| virtual SoType | getTypeId () const |
| Returns the type identifier for this specific instance. | |
| virtual void | startEvaluate () |
| Evaluate engine and dependencies in another thread without blocking the current one. | |
| virtual void | waitEvaluate () |
| Wait for the end of engine evaluation. | |
| virtual void | abortEvaluate () |
| Abort current processing as soon as possible. | |
| virtual bool | isEvaluating () |
| Returns true if the engine evaluation is in progress. | |
| Public Member Functions inherited from SoEngine | |
| virtual int | getOutputs (SoEngineOutputList &list) const |
| Returns a list of outputs in this engine. | |
| SoEngineOutput * | getOutput (const SbName &outputName) const |
| Returns a reference to the engine output with the given name. | |
| SbBool | getOutputName (const SoEngineOutput *output, SbName &outputName) const |
| Returns (in outputName) the name of the engine output (output). | |
| SoEngine * | copy () const |
| Creates and returns an exact copy of the engine. | |
| Public Member Functions inherited from SoFieldContainer | |
| void | setToDefaults () |
| Sets all fields in this object to their default values. | |
| SbBool | hasDefaultValues () const |
| Returns TRUE if all of the object's fields have their default values. | |
| SbBool | fieldsAreEqual (const SoFieldContainer *fc) const |
| Returns TRUE if this object's fields are exactly equal to fc's fields. | |
| void | copyFieldValues (const SoFieldContainer *fc, SbBool copyConnections=FALSE) |
| Copies the contents of fc's fields into this object's fields. | |
| SoNONUNICODE SbBool | set (const char *fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| SbBool | set (const SbString &fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| void | get (SbString &fieldDataString) |
| Returns the values of the fields of this object in the Open Inventor ASCII file format in the given string. | |
| virtual int | getFields (SoFieldList &list) const |
| Appends references to all of this object's fields to resultList, and returns the number of fields appended. | |
| virtual int | getAllFields (SoFieldList &list) const |
| Returns a list of fields, including the eventIn's and eventOut's. | |
| virtual SoField * | getField (const SbName &fieldName) const |
| Returns a the field of this object whose name is fieldName. | |
| virtual SoField * | getEventIn (const SbName &fieldName) const |
| Returns a the eventIn with the given name. | |
| virtual SoField * | getEventOut (const SbName &fieldName) const |
| Returns the eventOut with the given name. | |
| SbBool | getFieldName (const SoField *field, SbName &fieldName) const |
| Returns the name of the given field in the fieldName argument. | |
| SbBool | enableNotify (SbBool flag) |
| Notification at this Field Container is enabled (if flag == TRUE) or disabled (if flag == FALSE). | |
| SbBool | isNotifyEnabled () const |
| Notification is the process of telling interested objects that this object has changed. | |
| virtual void | setUserData (void *data) |
| Sets application data. | |
| void * | getUserData (void) const |
| Gets user application data. | |
| Public Member Functions inherited from SoBase | |
| virtual void | touch () |
| Marks an instance as modified, simulating a change to it. | |
| virtual SbName | getName () const |
| Returns the name of an instance. | |
| virtual void | setName (const SbName &name) |
| Sets the name of an instance. | |
| void | setSynchronizable (const bool b) |
| Sets this to be a ScaleViz synchronizable object. | |
| bool | isSynchronizable () const |
| Gets the ScaleViz synchronizable state of this object. | |
| Public Member Functions inherited from SoRefCounter | |
| void | ref () const |
| Adds a reference to an instance. | |
| void | unref () const |
| Removes a reference from an instance. | |
| void | unrefNoDelete () const |
| unrefNoDelete() should be called when it is desired to decrement the reference count, but not delete the instance if this brings the reference count to zero. | |
| int | getRefCount () const |
| Returns current reference count. | |
| void | lock () const |
| lock this instance. | |
| void | unlock () const |
| unlock this instance. | |
| Public Member Functions inherited from SoTypedObject | |
| SbBool | isOfType (const SoType &type) const |
| Returns TRUE if this object is of the type specified in type or is derived from that type. | |
| template<typename TypedObjectClass > | |
| SbBool | isOfType () const |
| Returns TRUE if this object is of the type of class TypedObjectClass or is derived from that class. | |
Public Attributes | |
| SoSFEnum | metricType |
| Type of metric used to measure the similarity/dissimilarity between the fixed and the transformed image. | |
| SoSFImageDataAdapter | inFixedImage |
| The reference image on which the moving image has to be registered. | |
| SoSFImageDataAdapter | inMovingImage |
| The input model image to be registered. | |
| SoSFDouble | tolerance |
| Maximum relative variation of the metric to stop the process. | |
| SoSFVec2i32 | pyramidLevels |
| A 2-dimensional vector: first coordinate is the coarsest resolution, second coordinate is the finest resolution. | |
| SoSFVec2f | elasticStandardDeviation |
| The standard deviation in pixel of the gaussian kernel used to smooth the displacement field at each iteration. | |
| SoSFVec2f | fluidStandardDeviation |
| The standard deviation in pixel of the gaussian kernel used to smooth the forces field at each iteration. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
| The inMovingImage transformed by the output displacement field. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outDisplacementField |
| The displacement field that maps a pixel of the moving image onto the corresponding pixel in the fixed image. | |
| Public Attributes inherited from SoImageVizEngine | |
| SbEventHandler< EventArg & > | onBegin |
| Event raised when the processing begins. | |
| SbEventHandler< EventArg & > | onEnd |
| Event raised when processing ends and the result is available. | |
| SbEventHandler< EventArg & > | onProgress |
| Event raised while processing is running. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SoImageVizEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
| Static Public Member Functions inherited from SoEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for the SoEngine class. | |
| static SoEngine * | getByName (const SbName &name) |
| Looks up engine(s) by name. | |
| static int | getByName (const SbName &name, SoEngineList &list) |
| Looks up engine(s) by name. | |
| Static Public Member Functions inherited from SoFieldContainer | |
| static SoType | getClassTypeId () |
| Returns the type of this class. | |
| Static Public Member Functions inherited from SoBase | |
| static SoType | getClassTypeId () |
| Returns type identifier for this class. | |
| Static Public Member Functions inherited from SoTypedObject | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
(Preview feature) SoElasticRegistrationProcessing2d engine
The SoElasticRegistrationProcessing2d engine computes the optimal elastic transformation to register a moving image on a fixed image.
Registration is a mapping technique between two images in order to compare it. The different registration algorithms depend on the type of transformation that will be applied on the moving image.
SoElasticRegistrationProcessing2d class computes the optimal elastic transformation to register a moving image on a fixed image.
The main output of the algorithm is a displacement image representing the computed transformation. Each pixel of this image contains two values: a displacement to apply in x direction and an other to apply in y direction on the corresponding pixel of the moving image to be registered on the fixed image.
The SoElasticRegistrationProcessing2d implementation relies on the non-rigid registration demon algorithm, it is detailed in the publication:
Jean-Philippe Thirion. Image matching as a diffusion process: an analogy with Maxwell’s demons. Medical Image Analysis, Elsevier, 1998, 2 (3), pp.243–260
SoElasticRegistrationProcessing2d has two levels of regularization: fluid and elastic. The fluid regularization corresponds to the forces field regularization and the elastic one corresponds to the displacement field regularization.
The forces field is an elementary displacement which is iteratively added to the current displacement field during the registration procedure. This forces field tends to decrease the similarity measure between the 2 images.
The coarsest and the finest resolution levels of the multi-resolution can be user-defined. The registration is evaluated at the coarsest level first and then iteratively at each level until the finest one. The higher finest level, the faster the computation is. The lower finest level, the more accurate the registration is.
The multi-resolution approach prevents the optimization procedure from falling into a local extrema and also speeds up the calculation.
SoElasticRegistrationProcessing2d also proposes a multi-resolution approach.
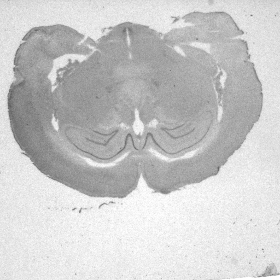
(a) | 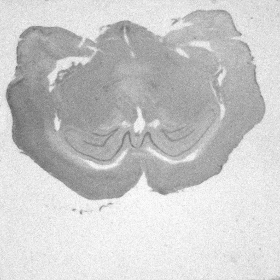
(b) | 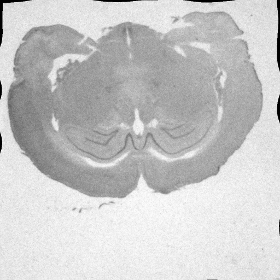
(c) |
| metricType | EUCLIDEAN |
| inFixedImage | NULL |
| inMovingImage | NULL |
| tolerance | 0.025 |
| pyramidLevels | 2 0 |
| elasticStandardDeviation | 10.0f 10.0f |
| fluidStandardDeviation | 10.0f 10.0f |
Definition at line 113 of file SoElasticRegistrationProcessing2d.h.
This enumeration handles all type of supported metric.
| Enumerator | |
|---|---|
| EUCLIDEAN | Mean Squared Difference, has to be minimized. |
Definition at line 125 of file SoElasticRegistrationProcessing2d.h.
| SoElasticRegistrationProcessing2d::SoElasticRegistrationProcessing2d | ( | ) |
Constructor.
| SoSFVec2f SoElasticRegistrationProcessing2d::elasticStandardDeviation |
The standard deviation in pixel of the gaussian kernel used to smooth the displacement field at each iteration.
Default value is SbVec2f(10.0f,10.0f).
Definition at line 150 of file SoElasticRegistrationProcessing2d.h.
| SoSFVec2f SoElasticRegistrationProcessing2d::fluidStandardDeviation |
The standard deviation in pixel of the gaussian kernel used to smooth the forces field at each iteration.
This parameter value is critical to reach large displacements. Default value is SbVec2f(10.0f,10.0f).
Definition at line 153 of file SoElasticRegistrationProcessing2d.h.
| SoSFImageDataAdapter SoElasticRegistrationProcessing2d::inFixedImage |
The reference image on which the moving image has to be registered.
Default value is NULL. Supported types include: grayscale image.
Definition at line 138 of file SoElasticRegistrationProcessing2d.h.
| SoSFImageDataAdapter SoElasticRegistrationProcessing2d::inMovingImage |
The input model image to be registered.
Default value is NULL. Supported types include: grayscale image.
Definition at line 141 of file SoElasticRegistrationProcessing2d.h.
| SoSFEnum SoElasticRegistrationProcessing2d::metricType |
Type of metric used to measure the similarity/dissimilarity between the fixed and the transformed image.
Only Euclidean metric is currently available. Use enum MetricType. Default is EUCLIDEAN
Definition at line 135 of file SoElasticRegistrationProcessing2d.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoElasticRegistrationProcessing2d::outDisplacementField |
The displacement field that maps a pixel of the moving image onto the corresponding pixel in the fixed image.
Each pixel of the displacement field image contains 2 values: a displacement in x direction and one in y direction. outDisplacementField is a 2D displacement field (2 spectral components) with floating point precision (32 bits). Default value is NULL. Supported types include: grayscale color image.
Definition at line 159 of file SoElasticRegistrationProcessing2d.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoElasticRegistrationProcessing2d::outImage |
The inMovingImage transformed by the output displacement field.
The image is in gray level. The output image has the same type than the input image which is registered. Default value is NULL. Supported types include: grayscale image.
Definition at line 156 of file SoElasticRegistrationProcessing2d.h.
| SoSFVec2i32 SoElasticRegistrationProcessing2d::pyramidLevels |
A 2-dimensional vector: first coordinate is the coarsest resolution, second coordinate is the finest resolution.
0 corresponds to the full resolution and N corresponds to a resolution of 
Definition at line 147 of file SoElasticRegistrationProcessing2d.h.
| SoSFDouble SoElasticRegistrationProcessing2d::tolerance |
Maximum relative variation of the metric to stop the process.
This variation is recomputed at each iteration. Default value is 0.025.
Definition at line 144 of file SoElasticRegistrationProcessing2d.h.