|
Open Inventor Release 2023.2.3
|
|

| |
|
Open Inventor Release 2023.2.3
|
|
|
| |
 SoSeparateObjectsProcessing engine separates objects in a binary image.
More...
SoSeparateObjectsProcessing engine separates objects in a binary image.
More...
#include <ImageViz/Engines/ImageSegmentation/SeparatingAndFilling/SoSeparateObjectsProcessing.h>
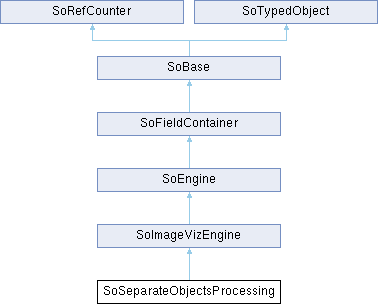
 Inheritance diagram for SoSeparateObjectsProcessing:
Inheritance diagram for SoSeparateObjectsProcessing:Public Types | |
| enum | SeparationMode { SEPARATED_OBJECTS = 0 , WATERSHED_RIDGES = 1 , SEPARATED_BASINS = 2 , CONTIGUOUS_BASINS = 3 , CONTIGUOUS_OBJECTS = 4 } |
| enum | AlgorithmMode { REPEATABLE = 0 , FAST = 1 } |
| Public Types inherited from SoImageVizEngine | |
| enum | ComputeMode { MODE_2D = 0 , MODE_3D = 1 , MODE_AUTO = 2 } |
| Compute Mode This enum specifies whether the main input will be interpreted as a 3D volume or a stack of 2D images for processing. More... | |
| enum | Neighborhood3d { CONNECTIVITY_6 = 0 , CONNECTIVITY_18 = 1 , CONNECTIVITY_26 = 2 } |
| Neighborhood Connectivity 3D. More... | |
Public Member Functions | |
| SoSeparateObjectsProcessing () | |
| Constructor. | |
| Public Member Functions inherited from SoImageVizEngine | |
| virtual SoType | getTypeId () const |
| Returns the type identifier for this specific instance. | |
| virtual void | startEvaluate () |
| Evaluate engine and dependencies in another thread without blocking the current one. | |
| virtual void | waitEvaluate () |
| Wait for the end of engine evaluation. | |
| virtual void | abortEvaluate () |
| Abort current processing as soon as possible. | |
| virtual bool | isEvaluating () |
| Returns true if the engine evaluation is in progress. | |
| Public Member Functions inherited from SoEngine | |
| virtual int | getOutputs (SoEngineOutputList &list) const |
| Returns a list of outputs in this engine. | |
| SoEngineOutput * | getOutput (const SbName &outputName) const |
| Returns a reference to the engine output with the given name. | |
| SbBool | getOutputName (const SoEngineOutput *output, SbName &outputName) const |
| Returns (in outputName) the name of the engine output (output). | |
| SoEngine * | copy () const |
| Creates and returns an exact copy of the engine. | |
| Public Member Functions inherited from SoFieldContainer | |
| void | setToDefaults () |
| Sets all fields in this object to their default values. | |
| SbBool | hasDefaultValues () const |
| Returns TRUE if all of the object's fields have their default values. | |
| SbBool | fieldsAreEqual (const SoFieldContainer *fc) const |
| Returns TRUE if this object's fields are exactly equal to fc's fields. | |
| void | copyFieldValues (const SoFieldContainer *fc, SbBool copyConnections=FALSE) |
| Copies the contents of fc's fields into this object's fields. | |
| SoNONUNICODE SbBool | set (const char *fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| SbBool | set (const SbString &fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| void | get (SbString &fieldDataString) |
| Returns the values of the fields of this object in the Open Inventor ASCII file format in the given string. | |
| virtual int | getFields (SoFieldList &list) const |
| Appends references to all of this object's fields to resultList, and returns the number of fields appended. | |
| virtual int | getAllFields (SoFieldList &list) const |
| Returns a list of fields, including the eventIn's and eventOut's. | |
| virtual SoField * | getField (const SbName &fieldName) const |
| Returns a the field of this object whose name is fieldName. | |
| virtual SoField * | getEventIn (const SbName &fieldName) const |
| Returns a the eventIn with the given name. | |
| virtual SoField * | getEventOut (const SbName &fieldName) const |
| Returns the eventOut with the given name. | |
| SbBool | getFieldName (const SoField *field, SbName &fieldName) const |
| Returns the name of the given field in the fieldName argument. | |
| SbBool | enableNotify (SbBool flag) |
| Notification at this Field Container is enabled (if flag == TRUE) or disabled (if flag == FALSE). | |
| SbBool | isNotifyEnabled () const |
| Notification is the process of telling interested objects that this object has changed. | |
| virtual void | setUserData (void *data) |
| Sets application data. | |
| void * | getUserData (void) const |
| Gets user application data. | |
| Public Member Functions inherited from SoBase | |
| virtual void | touch () |
| Marks an instance as modified, simulating a change to it. | |
| virtual SbName | getName () const |
| Returns the name of an instance. | |
| virtual void | setName (const SbName &name) |
| Sets the name of an instance. | |
| void | setSynchronizable (const bool b) |
| Sets this to be a ScaleViz synchronizable object. | |
| bool | isSynchronizable () const |
| Gets the ScaleViz synchronizable state of this object. | |
| Public Member Functions inherited from SoRefCounter | |
| void | ref () const |
| Adds a reference to an instance. | |
| void | unref () const |
| Removes a reference from an instance. | |
| void | unrefNoDelete () const |
| unrefNoDelete() should be called when it is desired to decrement the reference count, but not delete the instance if this brings the reference count to zero. | |
| int | getRefCount () const |
| Returns current reference count. | |
| void | lock () const |
| lock this instance. | |
| void | unlock () const |
| unlock this instance. | |
| Public Member Functions inherited from SoTypedObject | |
| SbBool | isOfType (const SoType &type) const |
| Returns TRUE if this object is of the type specified in type or is derived from that type. | |
| template<typename TypedObjectClass > | |
| SbBool | isOfType () const |
| Returns TRUE if this object is of the type of class TypedObjectClass or is derived from that class. | |
Public Attributes | |
| SoSFEnum | computeMode |
| Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode. | |
| SoSFEnum | neighborhood3d |
| In 3D configuration (see computeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels. | |
| SoSFImageDataAdapter | inBinaryImage |
| The input binary image. | |
| SoSFEnum | separationMode |
| Select the output image type: separation lines, split objects, separated basins or joined basins. | |
| SoSFEnum | algorithmMode |
| Select the algorithm mode for fastwatershed. | |
| SoSFInt32 | contrastValue |
| The depth of valley. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outSeparationImage |
| The output separation (binary or label) image. | |
| Public Attributes inherited from SoImageVizEngine | |
| SbEventHandler< EventArg & > | onBegin |
| Event raised when the processing begins. | |
| SbEventHandler< EventArg & > | onEnd |
| Event raised when processing ends and the result is available. | |
| SbEventHandler< EventArg & > | onProgress |
| Event raised while processing is running. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SoImageVizEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
| Static Public Member Functions inherited from SoEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for the SoEngine class. | |
| static SoEngine * | getByName (const SbName &name) |
| Looks up engine(s) by name. | |
| static int | getByName (const SbName &name, SoEngineList &list) |
| Looks up engine(s) by name. | |
| Static Public Member Functions inherited from SoFieldContainer | |
| static SoType | getClassTypeId () |
| Returns the type of this class. | |
| Static Public Member Functions inherited from SoBase | |
| static SoType | getClassTypeId () |
| Returns type identifier for this class. | |
| Static Public Member Functions inherited from SoTypedObject | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
SoSeparateObjectsProcessing engine separates objects in a binary image.
This engine computes the watershed lines of a binary image. You can adjust the contrast level which is used to reduce the number of markers for the watershed process.
This engine is a high-level combination of watershed, distance transform and numerical reconstruction algorithms. There is a limitation to the separating ability: if some particles overlap too much, they will not be separated. This engine can be used on the gradient modulus to compute best-fit contours.
Notice: This engine requires to preliminarily load the whole input data set into memory to be computed. As a consequence the input data set will be automatically loaded before the execution of this engine, ignoring the maximum memory parameter of the SbImageDataAdapterHelper::getAppropriateAdapter function or SoFileDataAdapter class If the input data set cannot fit in memory, this engine will fail during its computation. |
SoHExtremaWatershedProcessing.
| computeMode | MODE_AUTO |
| neighborhood3d | CONNECTIVITY_26 |
| inBinaryImage | NULL |
| separationMode | SEPARATED_OBJECTS |
| algorithmMode | REPEATABLE |
| contrastValue | 4 |
Definition at line 80 of file SoSeparateObjectsProcessing.h.
| Enumerator | |
|---|---|
| REPEATABLE | Repeatable but slower. |
| FAST | Faster but not repeatable because of asynchronous parallel computation. |
Definition at line 140 of file SoSeparateObjectsProcessing.h.
Definition at line 107 of file SoSeparateObjectsProcessing.h.
| SoSeparateObjectsProcessing::SoSeparateObjectsProcessing | ( | ) |
Constructor.
| SoSFEnum SoSeparateObjectsProcessing::algorithmMode |
Select the algorithm mode for fastwatershed.
Use enum AlgorithmMode. Default is REPEATABLE
Definition at line 154 of file SoSeparateObjectsProcessing.h.
| SoSFEnum SoSeparateObjectsProcessing::computeMode |
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
Definition at line 92 of file SoSeparateObjectsProcessing.h.
| SoSFInt32 SoSeparateObjectsProcessing::contrastValue |
The depth of valley.
Default value is 4.
Definition at line 157 of file SoSeparateObjectsProcessing.h.
| SoSFImageDataAdapter SoSeparateObjectsProcessing::inBinaryImage |
The input binary image.
Default value is NULL. Supported types include: binary color image.
Definition at line 102 of file SoSeparateObjectsProcessing.h.
| SoSFEnum SoSeparateObjectsProcessing::neighborhood3d |
In 3D configuration (see computeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels.
Use enum Neighborhood3d. Default is CONNECTIVITY_26.
Definition at line 99 of file SoSeparateObjectsProcessing.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoSeparateObjectsProcessing::outSeparationImage |
The output separation (binary or label) image.
Default value is NULL. Supported types include: grayscale binary label color image.
Definition at line 160 of file SoSeparateObjectsProcessing.h.
| SoSFEnum SoSeparateObjectsProcessing::separationMode |
Select the output image type: separation lines, split objects, separated basins or joined basins.
Use enum SeparationMode. Default is SEPARATED_OBJECTS
Definition at line 135 of file SoSeparateObjectsProcessing.h.