|
Open Inventor Release 2023.2.3
|
|

| |
|
Open Inventor Release 2023.2.3
|
|
|
| |
This category gathers engines for filtering images. More...
Modules | |
| Color Transforms | |
| This group contains engines specifically applying on a color input image. | |
| Frequency Domain | |
| This category contains FFT and related engines to work on frequency domain. | |
| Grayscale Transforms | |
| The Grayscale Transforms category contains gray level transformations such as histogram equalization and intensity rescaling operations. | |
| Sharpening | |
| The Sharpening category contains filters used to enhance the edges of objects and adjust contrast and shade characteristics. | |
| Smoothing And Denoising | |
| The Smoothing And Denoising category contains lowpass filters to reduce the contrast and soften the edges of objects in an image. | |
| Texture Filters | |
| This category contains engines revealing texture attributes. | |
This category gathers engines for filtering images.
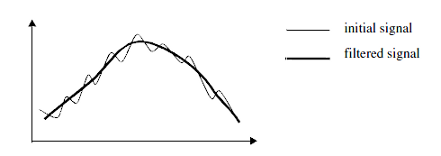
A common problem in filtering theory is to estimate a signal mixed with noise. A solution is the moving average , where the value of each pixel is replaced by the average of its neighbors (Figure 1). This is based on the assumption that short ranged variations result from noise. The filtered output can then be viewed as the main trend of the function.
Local changes in intensity present another common problem. Various filters can detect sharp transitions to enhance, contrast or detect edges. The Edge Detection algorithms use these types of filters.
Apart from the examples above, specific filters can be designed depending of the type of desired transition, such as:
From the mathematical point of view, a filter is an operator mapping an input function 



If 



The class of non-linear filters is too large to be presented in a comprehensive way here. Besides, many non-linear filters are in fact particular algorithms that do not fall into a specific theoretical family. Non-linear filters include SoDelineateProcessing and SoShadeProcessing2d in the Sharpening category, as well as the SoMedianFilterProcessing in the Smoothing And Denoising category.
Some non-linear filters like the SoBitShiftProcessing filter are shift invariant filters, i.e. filters such that: ![$\phi(f_h) = [\phi(f)]_h$](form_448_dark.png)


Shift invariant filters have the same effect on