|
Open Inventor Release 2026.1.1
|
|

| |
|
Open Inventor Release 2026.1.1
|
|
|
| |
Node representing a 3D rotation about the x-, y-, or z-axis. More...
#include <Inventor/nodes/SoRotationXYZ.h>
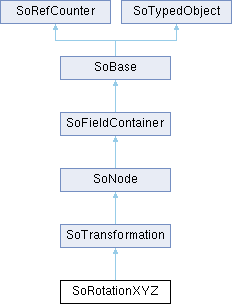
 Inheritance diagram for SoRotationXYZ:
Inheritance diagram for SoRotationXYZ:Public Types | |
| enum | Axis { X , Y , Z } |
| Rotation axis enumeration values. More... | |
Public Member Functions | |
| virtual SoType | getTypeId () const |
| Returns the type identifier for this specific instance. | |
| SoRotationXYZ () | |
| Creates a rotation node with default settings. | |
| SbRotation | getRotation () const |
| Returns an SbRotation equivalent to the specified rotation. | |
| Public Member Functions inherited from SoNode | |
| virtual void | setOverride (const SbBool state) |
| Turns the override flag on or off. | |
| virtual SbBool | isOverride () const |
| Returns the state of the override flag. | |
| virtual SoNode * | copy (SbBool copyConnections=FALSE) const |
| Creates and returns an exact copy of the node. | |
| virtual SbBool | affectsState () const |
| Returns TRUE if a node has an effect on the state during traversal. | |
| virtual void | touch () |
| Marks an instance as modified, simulating a change to it. | |
| Public Member Functions inherited from SoFieldContainer | |
| void | setToDefaults () |
| Sets all fields in this object to their default values. | |
| SbBool | hasDefaultValues () const |
| Returns TRUE if all of the object's fields have their default values. | |
| SbBool | fieldsAreEqual (const SoFieldContainer *fc) const |
| Returns TRUE if this object's fields are exactly equal to fc's fields. | |
| void | copyFieldValues (const SoFieldContainer *fc, SbBool copyConnections=FALSE) |
| Copies the contents of fc's fields into this object's fields. | |
| SoNONUNICODE SbBool | set (const char *fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| SbBool | set (const SbString &fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| void | get (SbString &fieldDataString) |
| Returns the values of the fields of this object in the Open Inventor ASCII file format in the given string. | |
| virtual int | getFields (SoFieldList &list) const |
| Appends references to all of this object's fields to resultList, and returns the number of fields appended. | |
| virtual int | getAllFields (SoFieldList &list) const |
| Returns a list of fields, including the eventIn's and eventOut's. | |
| virtual SoField * | getField (const SbName &fieldName) const |
| Returns a the field of this object whose name is fieldName. | |
| virtual SoField * | getEventIn (const SbName &fieldName) const |
| Returns a the eventIn with the given name. | |
| virtual SoField * | getEventOut (const SbName &fieldName) const |
| Returns the eventOut with the given name. | |
| SbBool | getFieldName (const SoField *field, SbName &fieldName) const |
| Returns the name of the given field in the fieldName argument. | |
| SbBool | enableNotify (SbBool flag) |
| Notification at this Field Container is enabled (if flag == TRUE) or disabled (if flag == FALSE). | |
| SbBool | isNotifyEnabled () const |
| Notification is the process of telling interested objects that this object has changed. | |
| virtual void | setUserData (void *data) |
| Sets application data. | |
| void * | getUserData (void) const |
| Gets user application data. | |
| Public Member Functions inherited from SoBase | |
| virtual SbName | getName () const |
| Returns the name of an instance. | |
| virtual void | setName (const SbName &name) |
| Sets the name of an instance. | |
| void | setSynchronizable (const bool b) |
| Sets this to be a ScaleViz synchronizable object. | |
| bool | isSynchronizable () const |
| Gets the ScaleViz synchronizable state of this object. | |
| Public Member Functions inherited from SoRefCounter | |
| void | ref () const |
| Adds a reference to an instance. | |
| void | unref () const |
| Removes a reference from an instance. | |
| void | unrefNoDelete () const |
| unrefNoDelete() should be called when it is desired to decrement the reference count, but not delete the instance if this brings the reference count to zero. | |
| int | getRefCount () const |
| Returns current reference count. | |
| void | lock () const |
| lock this instance. | |
| void | unlock () const |
| unlock this instance. | |
| Public Member Functions inherited from SoTypedObject | |
| SbBool | isOfType (const SoType &type) const |
| Returns TRUE if this object is of the type specified in type or is derived from that type. | |
| template<typename TypedObjectClass> | |
| SbBool | isOfType () const |
| Returns TRUE if this object is of the type of class TypedObjectClass or is derived from that class. | |
Static Public Member Functions | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
| Static Public Member Functions inherited from SoTransformation | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
| Static Public Member Functions inherited from SoNode | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
| static SoNode * | getByName (const SbName &name) |
| A node's name can be set using SoBase::setName(). | |
| static int | getByName (const SbName &name, SoNodeList &list) |
| A node's name can be set using SoBase::setName(). | |
| Static Public Member Functions inherited from SoFieldContainer | |
| static SoType | getClassTypeId () |
| Returns the type of this class. | |
| Static Public Member Functions inherited from SoBase | |
| static SoType | getClassTypeId () |
| Returns type identifier for this class. | |
| Static Public Member Functions inherited from SoTypedObject | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
Public Attributes | |
| SoSFEnum | axis |
| Rotation axis. | |
| SoSFFloat | angle |
| Rotation angle (in radians), using the right-hand rule. | |
Node representing a 3D rotation about the x-, y-, or z-axis.
This node defines a 3D rotation about one of the three principal axes. The rotation is accumulated into the current transformation, which is applied to subsequent shapes.
| axis | X |
| angle | 0 |
SoGetMatrixAction
Returns the matrix corresponding to the rotation.
Definition at line 98 of file SoRotationXYZ.h.
| enum SoRotationXYZ::Axis |
Rotation axis enumeration values.
| Enumerator | |
|---|---|
| X | The X-axis. |
| Y | The Y-axis. |
| Z | The Z-axis. |
Definition at line 105 of file SoRotationXYZ.h.
| SoRotationXYZ::SoRotationXYZ | ( | ) |
Creates a rotation node with default settings.
|
static |
Returns the type identifier for this class.
| SbRotation SoRotationXYZ::getRotation | ( | ) | const |
Returns an SbRotation equivalent to the specified rotation.
|
virtual |
Returns the type identifier for this specific instance.
Reimplemented from SoTransformation.
| SoSFFloat SoRotationXYZ::angle |
Rotation angle (in radians), using the right-hand rule.
Definition at line 129 of file SoRotationXYZ.h.
| SoSFEnum SoRotationXYZ::axis |