SoErosionCubeProcessing Class Reference
[Erosion And Dilation]
 SoErosionCubeProcessing engine
More...
SoErosionCubeProcessing engine
More...
#include <ImageViz/Engines/MathematicalMorphology/ErosionAndDilation/SoErosionCubeProcessing.h>
Public Member Functions | |
| SoErosionCubeProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFEnum | neighborhood3d |
| SoSFImageDataAdapter | inImage |
| SoSFInt32 | elementSize |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
Detailed Description
SoErosionCubeProcessing engine
The SoErosionCubeProcessing engine performs an erosion using a structuring element matching with a cube.
For an introduction, see:
This engine uses the default structuring element of 8 pixels for a square grid.
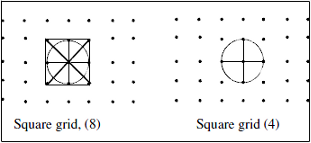
Structuring element of SoErosionCubeProcessing
With a 3D image, this engine uses the default structuring element of 6, 18 or 26 voxels.

Structuring elements: 6 voxels, 18 voxels and 26 voxels.
SEE ALSO
FILE FORMAT/DEFAULT
- ErosionCubeProcessing {
| computeMode | MODE_AUTO |
| neighborhood3d | CONNECTIVITY_26 |
| inImage | NULL |
| elementSize | 3 |
Library references: erode
Constructor & Destructor Documentation
| SoErosionCubeProcessing::SoErosionCubeProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The half size of the structuring element.
A structuring element always has an odd side length (3x3, 5x5, etc) which is defined by 2 * elementSize + 1. Default value is 3.
The input image.
Default value is NULL. Supported types include: grayscale binary label color image.
In 3D configuration (see computeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels.
Use enum Neighborhood3d. Default is CONNECTIVITY_26.
The output image.
Default value is NULL. Supported types include: grayscale binary label color image.
The documentation for this class was generated from the following file:
- ImageViz/Engines/MathematicalMorphology/ErosionAndDilation/SoErosionCubeProcessing.h