SoHysteresisThresholdingProcessing Class Reference
[Binarization]
 SoHysteresisThresholdingProcessing image filter
More...
SoHysteresisThresholdingProcessing image filter
More...
#include <ImageViz/Engines/ImageSegmentation/Binarization/SoHysteresisThresholdingProcessing.h>
Public Member Functions | |
| SoHysteresisThresholdingProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFImageDataAdapter | inImage |
| SoSFVec2f | thresholdLevel |
| SoSFInt32 | maxLength |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outBinaryImage |
Detailed Description
SoHysteresisThresholdingProcessing image filter
The SoHysteresisThresholdingProcessing engine computes a SoHysteresisThresholdingProcessing threshold.
The SoHysteresisThresholdingProcessing uses a SoHysteresisThresholdingProcessing loop to provide a more connected threshold result.
Two gray level values  and and
and and  ( thresholds parameter) are specified. The output is given by:
( thresholds parameter) are specified. The output is given by:
- If
 , the point is in the and is preserved:
, the point is in the and is preserved: 
- If
 , the point is in the :
, the point is in the : 
- If
 , the point is in the . The point is preserved if connected to a retained area (), or is rejected if not ().
, the point is in the . The point is preserved if connected to a retained area (), or is rejected if not ().
The Figure shows the result of a lower bound threshold with value and . Figure is the result of an SoHysteresisThresholdingProcessing, where the points in the fuzzy area not connected with points in the retained area are rejected.
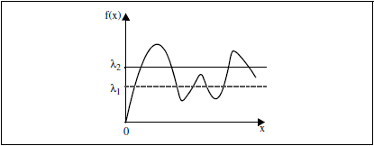
1-D function
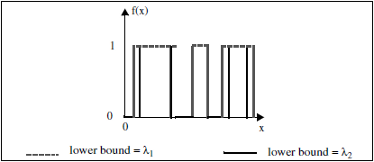
Low and high thresholds
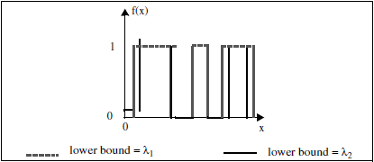
SoHysteresisThresholdingProcessing, fuzzy area rejected
This command can be used after an edge detection, which generates, as well as edges, a lot of noise. True edges have a higher chance to be connected to a retained area than pixels corresponding to noise.
SEE ALSO
FILE FORMAT/DEFAULT
- HysteresisThresholdingProcessing {
| computeMode | MODE_AUTO |
| inImage | NULL |
| thresholdLevel | 255.0f 128.0f |
| maxLength | 1 |
Library references: hysteresis
- See related examples:
Constructor & Destructor Documentation
| SoHysteresisThresholdingProcessing::SoHysteresisThresholdingProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
The input image.
Default value is NULL. Supported types include: grayscale image.
The maximum length allowed for pixel in fuzzy zone (0:until convergence).
Default value is 1.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoHysteresisThresholdingProcessing::outBinaryImage |
The output binary image.
Default value is NULL. Supported types include: binary image.
The low and high threshold levels.
Default value is SbVec2f(255.0f,128.0f).
The documentation for this class was generated from the following file:
- ImageViz/Engines/ImageSegmentation/Binarization/SoHysteresisThresholdingProcessing.h