Class SoRegionalExtremaProcessing
- java.lang.Object
-
- com.openinventor.inventor.Inventor
-
- com.openinventor.inventor.misc.SoBase
-
- com.openinventor.inventor.fields.SoFieldContainer
-
- com.openinventor.inventor.engines.SoEngine
-
- com.openinventor.imageviz.engines.SoImageVizEngine
-
- com.openinventor.imageviz.engines.mathematicalmorphology.geodesictransformations.SoRegionalExtremaProcessing
-
- All Implemented Interfaces:
SafeDisposable
public class SoRegionalExtremaProcessing extends SoImageVizEngine
SoRegionalExtremaProcessingengine. TheSoRegionalExtremaProcessingengine computes the regional or relative fast maxima and minima in a grayscale image, , and displays the result in a binary image,
, and displays the result in a binary image,  . This algorithm is based on [1] and uses a recursive method combined with a geodesic propagation. To avoid getting too many regions in the output image, input should first be smoothed with a low-pass filter or with the dual numerical reconstruction algorithm.
. This algorithm is based on [1] and uses a recursive method combined with a geodesic propagation. To avoid getting too many regions in the output image, input should first be smoothed with a low-pass filter or with the dual numerical reconstruction algorithm.
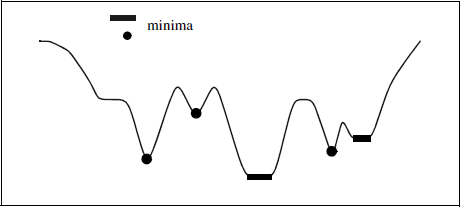
Case Minima
This case of use computes the regional or relative minima in a grayscale image and creates a binary image containing these minima.
A regional minimum
 is a set of connected pixels such that:
is a set of connected pixels such that:
- Pixels belonging to have the same intensity
 .
.
- Pixels connected to , but not belonging to (neighbors), have an intensity greater than .
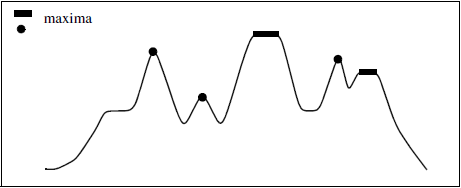
Case Maxima
This engine computes the regional or relative maxima in a grayscale image and creates a binary image containing these maxima.
A regional maximum
is a set of connected pixels such that:
- Pixels belonging to have the same intensity .
- Pixels connected to , but not belonging to (neighbors), have an intensity greater than .
[1] B. La
. "Recursive Algorithms in Mathematical Morphology." In Acta Stereologica. Vol. 6/III, pp 691-696, Caen, France, Sept. 1987. 7th International Congress For Stereology.
-
-
Nested Class Summary
Nested Classes Modifier and Type Class Description static classSoRegionalExtremaProcessing.RegionalOperators-
Nested classes/interfaces inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
SoImageVizEngine.ComputeModes, SoImageVizEngine.EventArg, SoImageVizEngine.Neighborhood3ds
-
Nested classes/interfaces inherited from class com.openinventor.inventor.Inventor
Inventor.ConstructorCommand
-
-
Field Summary
Fields Modifier and Type Field Description SoSFEnum<SoImageVizEngine.ComputeModes>computeModeSelect the compute Mode (2D or 3D or AUTO) .SoSFImageDataAdapterinImageThe input image.SoSFEnum<SoImageVizEngine.Neighborhood3ds>neighborhood3dIn 3D configuration (seecomputeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels.SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter>outBinaryImageThe output binary image.SoSFEnum<SoRegionalExtremaProcessing.RegionalOperators>regionalOperatorSelect the operator.-
Fields inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
onBegin, onEnd, onProgress
-
Fields inherited from class com.openinventor.inventor.Inventor
VERBOSE_LEVEL, ZeroHandle
-
-
Constructor Summary
Constructors Constructor Description SoRegionalExtremaProcessing()Constructor.
-
Method Summary
-
Methods inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
abortEvaluate, isEvaluating, startEvaluate, waitEvaluate
-
Methods inherited from class com.openinventor.inventor.engines.SoEngine
copy, getByName, getOutput, getOutputName
-
Methods inherited from class com.openinventor.inventor.fields.SoFieldContainer
copyFieldValues, copyFieldValues, enableNotify, fieldsAreEqual, get, getAllFields, getEventIn, getEventOut, getField, getFieldName, hasDefaultValues, isNotifyEnabled, set, setToDefaults
-
Methods inherited from class com.openinventor.inventor.misc.SoBase
dispose, getName, isDisposable, isSynchronizable, setName, setSynchronizable, touch
-
Methods inherited from class com.openinventor.inventor.Inventor
getNativeResourceHandle
-
-
-
-
Field Detail
-
computeMode
public final SoSFEnum<SoImageVizEngine.ComputeModes> computeMode
Select the compute Mode (2D or 3D or AUTO) . Default is MODE_AUTO
-
neighborhood3d
public final SoSFEnum<SoImageVizEngine.Neighborhood3ds> neighborhood3d
In 3D configuration (seecomputeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels. . Default is CONNECTIVITY_26.
-
regionalOperator
public final SoSFEnum<SoRegionalExtremaProcessing.RegionalOperators> regionalOperator
Select the operator. . Default is MAXIMA
-
inImage
public final SoSFImageDataAdapter inImage
The input image. Default value is NULL. Supported types include: grayscale binary label color image.
-
outBinaryImage
public final SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter> outBinaryImage
The output binary image. Default value is NULL. Supported types include: binary image.
-
-