|
Open Inventor Release 2023.2.3
|
|

| |
|
Open Inventor Release 2023.2.3
|
|
|
| |
 SoMultiscaleStructureEnhancementProcessing2d engine
More...
SoMultiscaleStructureEnhancementProcessing2d engine
More...
#include <ImageViz/Engines/ImageFiltering/TextureFilters/SoMultiscaleStructureEnhancementProcessing3d.h>
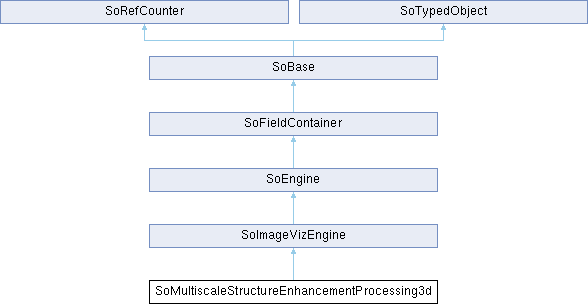
 Inheritance diagram for SoMultiscaleStructureEnhancementProcessing3d:
Inheritance diagram for SoMultiscaleStructureEnhancementProcessing3d:Public Types | |
| enum | TensorType { HESSIAN = 0 , GRADIENT = 1 } |
| enum | Lightness { BRIGHT = 0 , DARK = 1 } |
| enum | StructureType { ROD = 0 , BALL = 1 , PLANE = 2 } |
| Public Types inherited from SoImageVizEngine | |
| enum | ComputeMode { MODE_2D = 0 , MODE_3D = 1 , MODE_AUTO = 2 } |
| Compute Mode This enum specifies whether the main input will be interpreted as a 3D volume or a stack of 2D images for processing. More... | |
| enum | Neighborhood3d { CONNECTIVITY_6 = 0 , CONNECTIVITY_18 = 1 , CONNECTIVITY_26 = 2 } |
| Neighborhood Connectivity 3D. More... | |
Public Member Functions | |
| SoMultiscaleStructureEnhancementProcessing3d () | |
| Constructor. | |
| Public Member Functions inherited from SoImageVizEngine | |
| virtual SoType | getTypeId () const |
| Returns the type identifier for this specific instance. | |
| virtual void | startEvaluate () |
| Evaluate engine and dependencies in another thread without blocking the current one. | |
| virtual void | waitEvaluate () |
| Wait for the end of engine evaluation. | |
| virtual void | abortEvaluate () |
| Abort current processing as soon as possible. | |
| virtual bool | isEvaluating () |
| Returns true if the engine evaluation is in progress. | |
| Public Member Functions inherited from SoEngine | |
| virtual int | getOutputs (SoEngineOutputList &list) const |
| Returns a list of outputs in this engine. | |
| SoEngineOutput * | getOutput (const SbName &outputName) const |
| Returns a reference to the engine output with the given name. | |
| SbBool | getOutputName (const SoEngineOutput *output, SbName &outputName) const |
| Returns (in outputName) the name of the engine output (output). | |
| SoEngine * | copy () const |
| Creates and returns an exact copy of the engine. | |
| Public Member Functions inherited from SoFieldContainer | |
| void | setToDefaults () |
| Sets all fields in this object to their default values. | |
| SbBool | hasDefaultValues () const |
| Returns TRUE if all of the object's fields have their default values. | |
| SbBool | fieldsAreEqual (const SoFieldContainer *fc) const |
| Returns TRUE if this object's fields are exactly equal to fc's fields. | |
| void | copyFieldValues (const SoFieldContainer *fc, SbBool copyConnections=FALSE) |
| Copies the contents of fc's fields into this object's fields. | |
| SoNONUNICODE SbBool | set (const char *fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| SbBool | set (const SbString &fieldDataString) |
| Sets one or more fields in this object to the values specified in the given string, which should be a string in the Open Inventor file format. | |
| void | get (SbString &fieldDataString) |
| Returns the values of the fields of this object in the Open Inventor ASCII file format in the given string. | |
| virtual int | getFields (SoFieldList &list) const |
| Appends references to all of this object's fields to resultList, and returns the number of fields appended. | |
| virtual int | getAllFields (SoFieldList &list) const |
| Returns a list of fields, including the eventIn's and eventOut's. | |
| virtual SoField * | getField (const SbName &fieldName) const |
| Returns a the field of this object whose name is fieldName. | |
| virtual SoField * | getEventIn (const SbName &fieldName) const |
| Returns a the eventIn with the given name. | |
| virtual SoField * | getEventOut (const SbName &fieldName) const |
| Returns the eventOut with the given name. | |
| SbBool | getFieldName (const SoField *field, SbName &fieldName) const |
| Returns the name of the given field in the fieldName argument. | |
| SbBool | enableNotify (SbBool flag) |
| Notification at this Field Container is enabled (if flag == TRUE) or disabled (if flag == FALSE). | |
| SbBool | isNotifyEnabled () const |
| Notification is the process of telling interested objects that this object has changed. | |
| virtual void | setUserData (void *data) |
| Sets application data. | |
| void * | getUserData (void) const |
| Gets user application data. | |
| Public Member Functions inherited from SoBase | |
| virtual void | touch () |
| Marks an instance as modified, simulating a change to it. | |
| virtual SbName | getName () const |
| Returns the name of an instance. | |
| virtual void | setName (const SbName &name) |
| Sets the name of an instance. | |
| void | setSynchronizable (const bool b) |
| Sets this to be a ScaleViz synchronizable object. | |
| bool | isSynchronizable () const |
| Gets the ScaleViz synchronizable state of this object. | |
| Public Member Functions inherited from SoRefCounter | |
| void | ref () const |
| Adds a reference to an instance. | |
| void | unref () const |
| Removes a reference from an instance. | |
| void | unrefNoDelete () const |
| unrefNoDelete() should be called when it is desired to decrement the reference count, but not delete the instance if this brings the reference count to zero. | |
| int | getRefCount () const |
| Returns current reference count. | |
| void | lock () const |
| lock this instance. | |
| void | unlock () const |
| unlock this instance. | |
| Public Member Functions inherited from SoTypedObject | |
| SbBool | isOfType (const SoType &type) const |
| Returns TRUE if this object is of the type specified in type or is derived from that type. | |
| template<typename TypedObjectClass > | |
| SbBool | isOfType () const |
| Returns TRUE if this object is of the type of class TypedObjectClass or is derived from that class. | |
Public Attributes | |
| SoSFImageDataAdapter | inImage |
| Input image. | |
| SoSFEnum | tensorType |
| Defines whether the command will use the gradient tensor or the hessian matrix. | |
| SoSFVec2f | standardDeviationRange |
| Standard deviation of the Gaussian kernel at the minimum and maximum scale. | |
| SoSFFloat | standardDeviationStep |
| Standard deviation step. | |
| SoSFEnum | lightness |
| The lightness type of structures to enhance. | |
| SoSFEnum | structureType |
| Shape of structures to extract. | |
| SoImageVizEngineOutput< SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
| Output image. | |
| Public Attributes inherited from SoImageVizEngine | |
| SbEventHandler< EventArg & > | onBegin |
| Event raised when the processing begins. | |
| SbEventHandler< EventArg & > | onEnd |
| Event raised when processing ends and the result is available. | |
| SbEventHandler< EventArg & > | onProgress |
| Event raised while processing is running. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SoImageVizEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
| Static Public Member Functions inherited from SoEngine | |
| static SoType | getClassTypeId () |
| Returns the type identifier for the SoEngine class. | |
| static SoEngine * | getByName (const SbName &name) |
| Looks up engine(s) by name. | |
| static int | getByName (const SbName &name, SoEngineList &list) |
| Looks up engine(s) by name. | |
| Static Public Member Functions inherited from SoFieldContainer | |
| static SoType | getClassTypeId () |
| Returns the type of this class. | |
| Static Public Member Functions inherited from SoBase | |
| static SoType | getClassTypeId () |
| Returns type identifier for this class. | |
| Static Public Member Functions inherited from SoTypedObject | |
| static SoType | getClassTypeId () |
| Returns the type identifier for this class. | |
SoMultiscaleStructureEnhancementProcessing2d engine
The purpose of this algorithm is to enhance structures of interest from an image using a multi scale analysis. The result of this algorithm is a score image that can be used with the goal of segmenting the input image.
The SoMultiscaleStructureEnhancement filters compute a score between 0 and 1 for each pixel, 1 representing a good matching with a structure model and 0 a background pixel. This provides a powerful technique for automatically identifying structures such as blood vessels. The score can be computed either on an Hessian matrix to detect ridge structures or on a Gradient tensor for object edges and corners. The structure models available are:
The principle of the algorithm can be summarized as follows :
The following publication describes this algorithm when applied to detect Rod structures with the Hessian matrix: A.F.Frangi, W.J.Niessen, K.L.Vincken, M.A.Viergever, "Multiscale vessel enhancement filtering", Lecture Notes in Computer Science(MICCAI), vol. 1496, pp. 130-137, 1998.
2 modes are available for computing the tensor field; the GRADIENT mode and the HESSIAN mode. The first one is based on the gradient tensor the second one on the hessian matrix.
In the GRADIENT mode, the gradient tensor is extracted. This tensor also referred to as structure tensor or second order moment matrix, is a matrix derived from the gradient of the image. This matrix summarizes the predominant directions of the gradient around the voxel of interest.

Where 
In this mode, the tensor field is based on the extraction of the hessian matrix of the image. This hessian matrix is computed by filtering the image with the derivative of a gaussian kernel.The standard deviation of the kernel controls the scale of analysis.
The parameter structureType controls the type of structure that is extracted from the tensor field(ROD/BALL/PLANE). The computation is based on eigen values 



Let first introduce


The first ratio attains its maximum for blob-like structure. The second ratio distinguishes plate-like and line-like structures.
The score for StructureType3D::ROD corresponds to :

The score for StructureType3D::BALL is computed as follow :

The score for StructureType3D::PLANE is computed as follow :

where 






In the HESSIAN mode, the lightness parameter limits the feature extraction to dark or bright objects by analyzing the sign of eigenvalues. This parameter is ignored in GRADIENT mode where tensors are positive definite matrices.
SoMultiscaleStructureEnhancementProcessing2d.
| inImage | NULL |
| tensorType | HESSIAN |
| standardDeviationRange | 1.0f 3.0f |
| standardDeviationStep | 1.0f |
| lightness | BRIGHT |
| structureType | ROD |
Definition at line 158 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| Enumerator | |
|---|---|
| BRIGHT | Extracts bright structures from dark background. |
| DARK | Extracts dark structures from bright background. |
Definition at line 198 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| Enumerator | |
|---|---|
| ROD | Extracts tubular structures. |
| BALL | Extracts blob-like structures. |
| PLANE | Extracts plate-like structures. |
Definition at line 217 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| Enumerator | |
|---|---|
| HESSIAN | Extracts the Hessian matrix. |
| GRADIENT | Extracts the gradient tensor. |
Definition at line 173 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| SoMultiscaleStructureEnhancementProcessing3d::SoMultiscaleStructureEnhancementProcessing3d | ( | ) |
Constructor.
| SoSFImageDataAdapter SoMultiscaleStructureEnhancementProcessing3d::inImage |
Input image.
Type of the image can be integer or floating. Default value is NULL. Supported types include: grayscale image.
Definition at line 168 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| SoSFEnum SoMultiscaleStructureEnhancementProcessing3d::lightness |
The lightness type of structures to enhance.
Use enum Lightness. Default is BRIGHT
Definition at line 212 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter*> SoMultiscaleStructureEnhancementProcessing3d::outImage |
Output image.
Type of the output image is forced to float. Default value is NULL. Supported types include: grayscale image.
Definition at line 238 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| SoSFVec2f SoMultiscaleStructureEnhancementProcessing3d::standardDeviationRange |
Standard deviation of the Gaussian kernel at the minimum and maximum scale.
Default value is SbVec2f(1.0f,3.0f).
Definition at line 190 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| SoSFFloat SoMultiscaleStructureEnhancementProcessing3d::standardDeviationStep |
Standard deviation step.
Structures will be detected from min to max standard deviation at a pitch of this value. Default value is 1.0f.
Definition at line 193 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| SoSFEnum SoMultiscaleStructureEnhancementProcessing3d::structureType |
Shape of structures to extract.
Use enum StructureType. Default is ROD
Definition at line 235 of file SoMultiscaleStructureEnhancementProcessing3d.h.
| SoSFEnum SoMultiscaleStructureEnhancementProcessing3d::tensorType |
Defines whether the command will use the gradient tensor or the hessian matrix.
Use enum TensorType. Default is HESSIAN
Definition at line 187 of file SoMultiscaleStructureEnhancementProcessing3d.h.