|
Open Inventor Release 2024.2.3
|
|

| |
|
Open Inventor Release 2024.2.3
|
|
|
| |
PoCartesianGrid2D or PbCartesianGrid2D
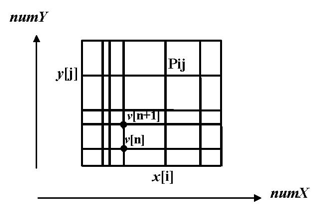
This mesh represents a grid in Cartesian coordinates. Even if a grid is of regular topology, the geometry of this type of mesh is not necessarily regular. The cells are quadrilaterals with opposite sides that are not necessarily parallel. The topology of the mesh is defined by two integers, numX and numY. Hence the mesh is composed of (numX -1) * (numY -1) cells. The geometry is defined by an x and y coordinate array of numX * numY floats.
These arrays are in a y-line after y-line order: the node Pij, in the previous figure, has coordinatesxP = x[i*numY+j], yP = y[i*numY+j]. A data set of this type of mesh is also defined by an array v of numX * numY floats, where v [i**numY* +j] is the value of the node Pij.
PoParalCartesianGrid2D or PbParalCartesianGrid2D This mesh represents a rectangular grid in Cartesian coordinates. Each cell of the mesh is a rectangle. The topology of the mesh is defined by two integers, numX and numY. Hence, the mesh is composed of (numX -1) * (numY -1) cells. The geometry is defined by an array x of numX floats and by an array y of numY floats. x is the list of the numX abscissas of the vertical lines, and y is the list of the numY ordinates of the horizontal lines. These arrays must be given in a monotonically increasing or decreasing order.
Example : Parallel Cartesian grid 2D mesh numX =7, numY =6
 A data set of this kind of mesh is defined by an array v of numX * numY floats, in a y-line after y-line order. v [i* numY +j] is the value of the node Pij which has coordinates x [i], y [j].
A data set of this kind of mesh is defined by an array v of numX * numY floats, in a y-line after y-line order. v [i* numY +j] is the value of the node Pij which has coordinates x [i], y [j].
PoRegularCartesianGrid2D or PbRegularCartesianGrid2D This mesh represents a rectangular and regular grid in Cartesian coordinates. Each cell of the mesh is a rectangle. Each cell has the same width and the same height. The topology of the mesh is defined by two integers, numX and numY. So, the mesh is composed of (numX -1) * (numY -1) cells. The geometry is defined by the bounding box of the mesh, i.e. by four floats: x_min, x_max, y_min, y_max.
Example : Regular Cartesian grid 2D mesh numX =8, numY =7
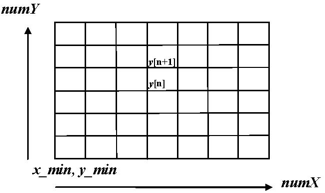 A data set of this type of mesh is defined by an array v of numX * numY floats, in a y-line after y-line order. v [i* numY +j] is the value of the node Pij which has coordinates x [i], y [j].
A data set of this type of mesh is defined by an array v of numX * numY floats, in a y-line after y-line order. v [i* numY +j] is the value of the node Pij which has coordinates x [i], y [j].
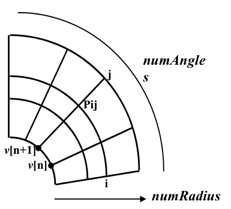 PoPolarGrid2D or PbPolarGrid2D This mesh represents a grid in polar coordinates. Each cell of the mesh is an area between two arcs and two radius lines. The topology of the mesh is defined by two integers, numRadius and numAngles. Hence, the mesh is composed of (numRadius -1) * (numAngles -1) cells. The geometry is defined by an array radius of numRadius floats and by an array angles of numAngles floats. radius is the list of the radius values of the numRadius arc lines, and angles is the list of angles of the numAngles radius lines.
PoPolarGrid2D or PbPolarGrid2D This mesh represents a grid in polar coordinates. Each cell of the mesh is an area between two arcs and two radius lines. The topology of the mesh is defined by two integers, numRadius and numAngles. Hence, the mesh is composed of (numRadius -1) * (numAngles -1) cells. The geometry is defined by an array radius of numRadius floats and by an array angles of numAngles floats. radius is the list of the radius values of the numRadius arc lines, and angles is the list of angles of the numAngles radius lines.
A data set for this kind of mesh is defined by an array v of numRadius * numAngles floats, in an arc-line after arc-line order. v [i* numAngles +j] is the value of the node Pij which has polar coordinates radius [i], angles [j].
PoIndexedMesh2D or PbIndexedMesh2D This mesh represents any shape composed by a list of cells. The mesh can be convex or not, and connected or not. Each cell is a convex polygon with any number of nodes. The mesh is said to be indexed because each cell is defined by its nodes whose indices point to an array of node coordinates. Two adjacent cells must have 2 common node indices. If a cell edge (defined by 2 consecutive node indices) belongs to only one cell, this edge is considered to be part of an external or internal mesh limit. A cell can only have 1 adjacent cell along one edge or no adjacent cell at all.
The topology of the mesh is defined by the number of cells numElems, the number of nodes numNodes, the node indices list of each cell elemIndex, and the number of nodes of each cell elemType. elemType is an array of numElems integers. For example, elemType [i] = 3 means that the i-th cell is a triangle. elemIndex is an array of N integers where N = elemType [0] + elemType [1] +... + elemType [ numElems -1].
numElems = 3, numNodes = 6,
elemType = { 3,3,4},
elemIndex = { 0,1,2, 3,5,4, 2,1,5,3}
 The geometry of the mesh is defined by the two arrays xNode and yNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i].
The geometry of the mesh is defined by the two arrays xNode and yNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i].
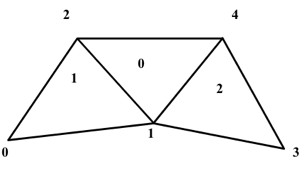
PoTriangleMesh2D or PbTriangleMesh2D This mesh represents any shape composed of a list of triangular cells. The mesh can be convex or not, and connected or not. Each cell is defined by three nodes whose indices point to an array of node coordinates. Two adjacent cells must have two common node indices. If a cell’s edge (defined by two consecutive node indices) belongs to only one cell, this cell is considered to be part of an external or internal mesh limit. A cell can only have one adjacent cell along one edge or no adjacent cell at all.
The topology of the mesh is defined by the number of cells numTriangles, the number of nodes numNodes, and the three node indices of each triangle triangleIndex. triangleIndex is an array of numTriangles *3 integers, where triangleIndex [i*3 + j] is the j-th node of the i-th triangle (0<=j<3).
numTriangles = 3, numNodes = 5,
*triangleIndex = { 1,2,4, 0,2,1, 1,4,3}
 The geometry of the mesh is defined by the 2 arrays xNode and yNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i].
The geometry of the mesh is defined by the 2 arrays xNode and yNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i].
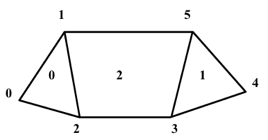
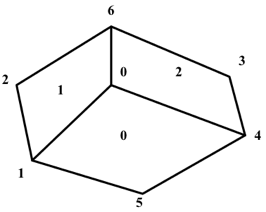
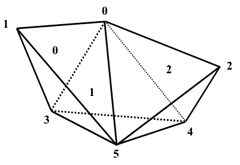
PoQuadrangleMesh2D or PbQuadrangleMesh2D This mesh represents any shape composed of a list of quadrangular (quadrilateral) cells. The mesh can be convex or not, and connected or not. Each cell is defined by its four nodes whose indices point to an array of nodes coordinates. Two adjacent cells must have two common node indices. If a cell edge (defined by two consecutive node indices) belongs to only one cell, this cell is considered to be a part of an external or internal mesh limit. A cell can only have one adjacent cell along one edge or no adjacent cell at all.
The topology of the mesh is defined by the number of cells numQuadrangles, the number of nodes numNodes, and the four node indices of each cell quadrangleIndex. quadrangleIndex is an array of numQuadrangles *4 integers, where quadrangleIndex [i*4 + j] is the j-th node of the i-th quadrangle (0<=j<4).
numQuadrangles = 3, numNodes = 7,
*quadrangleIndex = { 0,4,5,1, 0,1,2,6, 0,6,3,4}
 The geometry of the mesh is defined by the two arrays xNode and yNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i].
The geometry of the mesh is defined by the two arrays xNode and yNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i].
PoCartesianGrid3D or PbCartesianGrid3D This mesh represents a 3D volume grid in Cartesian coordinates. Even if a grid is of regular topology, the geometry of this type of mesh is not necessarily regular. The cells are hexahedrons with opposite facets that are not necessarily parallel. The topology of the mesh is defined by three integers numX, numY, and numZ. The mesh is thus composed of (numX -1) * (numY -1) * (numZ -1) cells.
Example : Irregular Cartesian grid 3D mesh numX = 5, numY = 4, numZ = 2
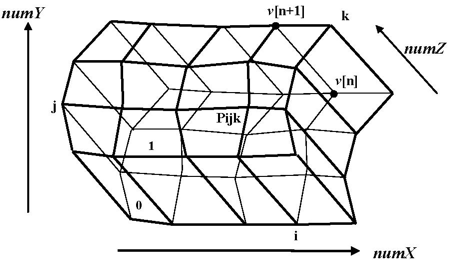 The geometry is defined by x, y, and z coordinates arrays of numX * numY * numZ floats. These arrays are in a z-lines after z-lines order: the node Pijk, in the previous figure, has coordinatesxP = x [i* numY * numZ + j* numZ + k], yP = y [i**numY* * numZ + j* numZ + k], zP = z [i* numY * numZ + j* numZ + k]. A data set of this type of mesh is also defined by an array v of numX * numY * numZ floats where v [i* numY
The geometry is defined by x, y, and z coordinates arrays of numX * numY * numZ floats. These arrays are in a z-lines after z-lines order: the node Pijk, in the previous figure, has coordinatesxP = x [i* numY * numZ + j* numZ + k], yP = y [i**numY* * numZ + j* numZ + k], zP = z [i* numY * numZ + j* numZ + k]. A data set of this type of mesh is also defined by an array v of numX * numY * numZ floats where v [i* numY
PoParalCartesianGrid3D or PbParalCartesianGrid3D This mesh represents a parallelepiped grid in Cartesian coordinates. Each cell of the mesh is a parallelepiped. The topology of the mesh is defined by three integers numX, numY, and numZ. The mesh is thus composed of (numX -1) * (numY -1) * (numZ -1) cells. The geometry is defined by an array x of numX floats, an array y of numY floats, and by an array z of numZ floats. x is the list of the numX abscissas of the lines perpendicular to the X-plane. y is the list of the numY ordinates of the lines perpendicular to the Y-plane. z is the list of the numZ z-coordinates of the lines perpendicular to the Z-plane. These arrays must be given in monotonically increasing or decreasing order.
Example : Parallel Cartesian grid 3D mesh numX = 7, numY = 6, numZ = 3
 A data set of this type of mesh is defined by an array v of numX * numY * numZ floats, in a z-lines after z-lines order. v [i* numY * numZ + j* numZ + k] is the value of the node which has the coordinates x [i], y [j], z [k].
A data set of this type of mesh is defined by an array v of numX * numY * numZ floats, in a z-lines after z-lines order. v [i* numY * numZ + j* numZ + k] is the value of the node which has the coordinates x [i], y [j], z [k].
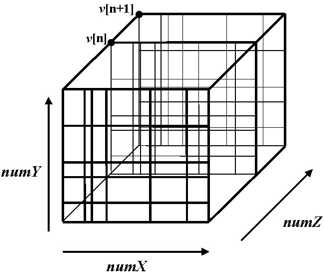
PoRegularCartesianGrid3D or PbRegularCartesianGrid3D This mesh represents a parallelepiped and regular grid in Cartesian coordinates. Each cell of the mesh is a parallelepiped, and each one has the same size. The topology of the mesh is defined by three integers numX, numY, and numZ. The mesh is thus composed of (numX -1) * (numY -1) * (numZ -1) cells. The geometry is defined by the bounding box of the mesh, i.e. by six floats: x_min, x_max, y_min, y_max, z_min, z_max.
Example : Regular Cartesian grid 3D mesh
numX = 5, numY = 4, numZ = 4
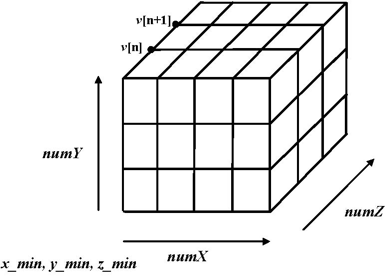 A data set of this type of mesh is defined by an array v of numX * numY * numZ floats, in a z-lines after z-lines order. v [i* numY * numZ + j* numZ + k] is the value of the node which has the coordinates x [i],y [j], z [k].
A data set of this type of mesh is defined by an array v of numX * numY * numZ floats, in a z-lines after z-lines order. v [i* numY * numZ + j* numZ + k] is the value of the node which has the coordinates x [i],y [j], z [k].
Each z “slice” is defined in left-to-right (x), bottom-to-top (y) order. Slices are defined front-to-back.
PoIndexedMesh3D or PbIndexedMesh3D This mesh represents any 3D volume shape composed of a list of cells. The mesh can be convex or not, and can be connected or not. Each cell is a polyhedron which can either be a tetrahedron (4 nodes), a pyramid (5 nodes), a pentahedron (6 nodes), or a hexahedron (8 nodes). The mesh is said to be indexed because each cell is defined by its node indices pointing to an array of node coordinates. Two adjacent cells must have three or four common node indices. If a cell’s facet belongs to only one cell, this facet is considered to be a part of an external or internal mesh limit (an internal mesh limit is the limit of an inside hole). The cell’s facets that do not belong to the mesh limit must be referenced exactly twice in the mesh. A cell can only have one adjacent cell along one facet or no adjacent cell at all.
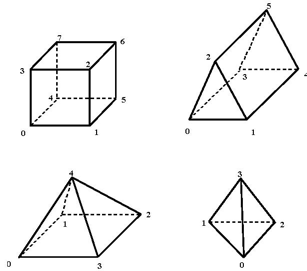 The cells must be numbered as shown: The following rule is applied: for each cell, the first three or four indices (depending on the cell type) define a cell’s facet, and orient this facet towards the interior side of the element. The topology of the mesh is defined by the number of cells numElems, the number of nodes numNodes, the node indices list of each cells elemIndex, and the number of nodes of each cell elemType. elemType is an array of numElems integers. For example, elemType [i] = 8 means that the i-th cell is a hexahedron. elemIndex is an array of N integers where N = elemType [0]+ elemType [1]+...+ elemType [ numElems -1].
The cells must be numbered as shown: The following rule is applied: for each cell, the first three or four indices (depending on the cell type) define a cell’s facet, and orient this facet towards the interior side of the element. The topology of the mesh is defined by the number of cells numElems, the number of nodes numNodes, the node indices list of each cells elemIndex, and the number of nodes of each cell elemType. elemType is an array of numElems integers. For example, elemType [i] = 8 means that the i-th cell is a hexahedron. elemIndex is an array of N integers where N = elemType [0]+ elemType [1]+...+ elemType [ numElems -1].
*numElems = 3, numNodes = 8, elemType = { 6,4,4}, elemIndex = { 1,7,0,2,5,3, 0,6,7,1, 2,5,3,4}
 The geometry of the mesh is defined by the three arrays xNode, yNode, and zNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i], zNode [i].
The geometry of the mesh is defined by the three arrays xNode, yNode, and zNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i], zNode [i].
PoTetrahedronMesh3D or PbTetrahedronMesh3D This mesh represents any 3D volume shape composed of a list of tetrahedrons. The mesh can be convex or not, and can be connected or not. Each tetrahedron is defined by four nodes whose indices point to an array of nodes coordinates. Two adjacent tetrahedrons must have three common node indices. If a tetrahedron’s facet belongs to only one tetrahedron, this facet is considered to be a part of an external or internal mesh limit. The tetrahedron’s facet which do not belong to the mesh limit must be referenced exactly twice in the mesh. A tetrahedron can only have one adjacent tetrahedron along one facet or no adjacent tetrahedron at all.
Each tetrahedron must be numbered as shown:
The following rule is applied: for each tetrahedron, the first three indices define a facet, and orient this facet towards the interior side of the tetrahedron.
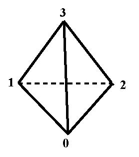 The topology of the mesh is defined by the number of tetrahedrons numTetrahedrons, the number of nodes numNodes, and the four node indices of each tetrahedron tetrahedronIndex. tetrahedronIndex is an array of numTetrahedrons *4 integers, where tetrahedronIndex [i*4 + j] is the j-th node of the i-th tetrahedron (0<=j<4).
The topology of the mesh is defined by the number of tetrahedrons numTetrahedrons, the number of nodes numNodes, and the four node indices of each tetrahedron tetrahedronIndex. tetrahedronIndex is an array of numTetrahedrons *4 integers, where tetrahedronIndex [i*4 + j] is the j-th node of the i-th tetrahedron (0<=j<4).
*numTetrahedrons = 3, numNodes = 6, tetrahedronIndex = { 0,5,1,3, 3,5,4,0,0,4,2,5}
 The geometry of the mesh is defined by the three arrays xNode, yNode, and zNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i], zNode [i].
The geometry of the mesh is defined by the three arrays xNode, yNode, and zNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i], zNode [i].
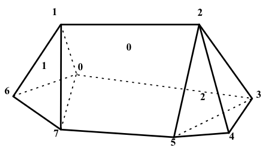
PoHexahedronMesh3D or PbHexahedronMesh3D This mesh represents any 3D volume shape composed of a list of hexahedrons. The mesh can be convex or not, and can be connected or not. Each hexahedron is defined by its eight nodes whose indices point to an array of nodes coordinates. Two adjacent hexahedrons must have four common node indices. If a hexahedron’s facet belongs to only one hexahedron, this facet is considered to be a part of an external or internal mesh limit. The hexahedron’s facets which do not belong to the mesh limit must be referenced exactly twice in the mesh. A hexahedron can only have one adjacent hexahedron along one facet or no adjacent hexahedron at all.
Each hexahedron must be numbered as shown:
The following rule is applied: for each hexahedron, the first four indices define a facet, and orient this facet towards the interior side of the hexahedron.
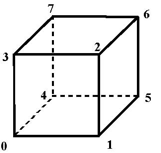 The topology of the mesh is defined by the number of hexahedrons numHexahedrons, the number of nodes numNodes, and the eight node indices of each hexahedron hexahedronIndex. hexahedronIndex is an array of numHexahedrons *8 integers, where hexahedronIndex [i*8 + j] is the j-th node of the i-th hexahedron (0<=j<8).
The topology of the mesh is defined by the number of hexahedrons numHexahedrons, the number of nodes numNodes, and the eight node indices of each hexahedron hexahedronIndex. hexahedronIndex is an array of numHexahedrons *8 integers, where hexahedronIndex [i*8 + j] is the j-th node of the i-th hexahedron (0<=j<8).
numHexahedrons = 2, numNodes = 12,
hexahedronIndex = { 10,7,6,11,4,1,2,5,4,1,0,3,10,7,8,9 }
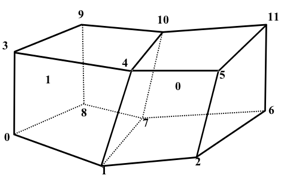 The geometry of the mesh is defined by the three arrays xNode, yNode, and zNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i], zNode [i].
The geometry of the mesh is defined by the three arrays xNode, yNode, and zNode of numNodes float coordinates. A data set of this type of mesh is defined by an array v of numNodes floats. v [i] is the value of the node which has coordinates xNode [i], yNode [i], zNode [i].